VECTOR Operator — Інструкція з монтажу (UA)
D00619EN v12 | Переклад з англійської. Офіційний представник в Україні — Parkan.ua
Уважно прочитайте цю інструкцію повністю перед початком монтажу оператора. Зберігайте цей посібник у безпечному місці для подальшого використання. Цей посібник призначений виключно для професійних монтажників.
Зміст
- 1. Ідентифікація продукту
- 2. Транспортування, зберігання та обслуговування
- 3. Технічні характеристики
- 4. Підготовка до монтажу
- 5. Монтаж
- 5.1 Типи важелів
- 5.2 Встановлення оператора
- 5.3 Рівні позиціонування
- 5.4 Монтаж висувного жорсткого важеля
- 5.4.1 Монтаж напрямної важеля SLIM
- 5.5 Монтаж штовхаючого шарнірного важеля
- 5.5.1 Кріплення важеля до стулки
- 5.6 Регулювання пружини
- 5.7 Вибір рівня гальмування
- 5.8 Перевірка перед підключенням
- 5.9 Підключення до електромережі
- 5.10 Електронна плата VECTOR
- 5.11 Електронні підключення
- 5.12 Вибір типу важеля
- 5.13 Підключення входів керування
- 5.14 Допоміжні виходи
- 5.15 Встановлення та навчання сенсорів
- 5.16 Управління DIP-перемикачами
- 5.17 Управління дисплеєм
- 6. Введення в експлуатацію
- 7. Безпека
- 8. Технічне обслуговування
- 9. Пошук та усунення несправностей
- 10. Додатки
1. Ідентифікація продукту
1.1 Опис продукту
Розпашний оператор manusa VECTOR спеціально розроблений для забезпечення швидкого, безпечного та контрольованого доступу людей до всіх типів приміщень.
Це оператор для автоматичних розпашних дверей з високою інтенсивністю руху, доступний з тяговими (pull) або штовхаючими (push) важелями для одностулкових та двостулкових дверей.
VECTOR — це сучасний електромеханічний оператор, що використовується для автоматизації будь-якого типу нових або існуючих розпашних дверей. Це високоефективний, високопродуктивний оператор, спеціально розроблений для інтенсивного використання — він може автоматизувати як легкі, так і дуже важкі двері.
manusa VECTOR також рекомендований для герметичних дверей для чистих приміщень та для середовищ із сильними вітрами, завдяки спеціальним режимам роботи.
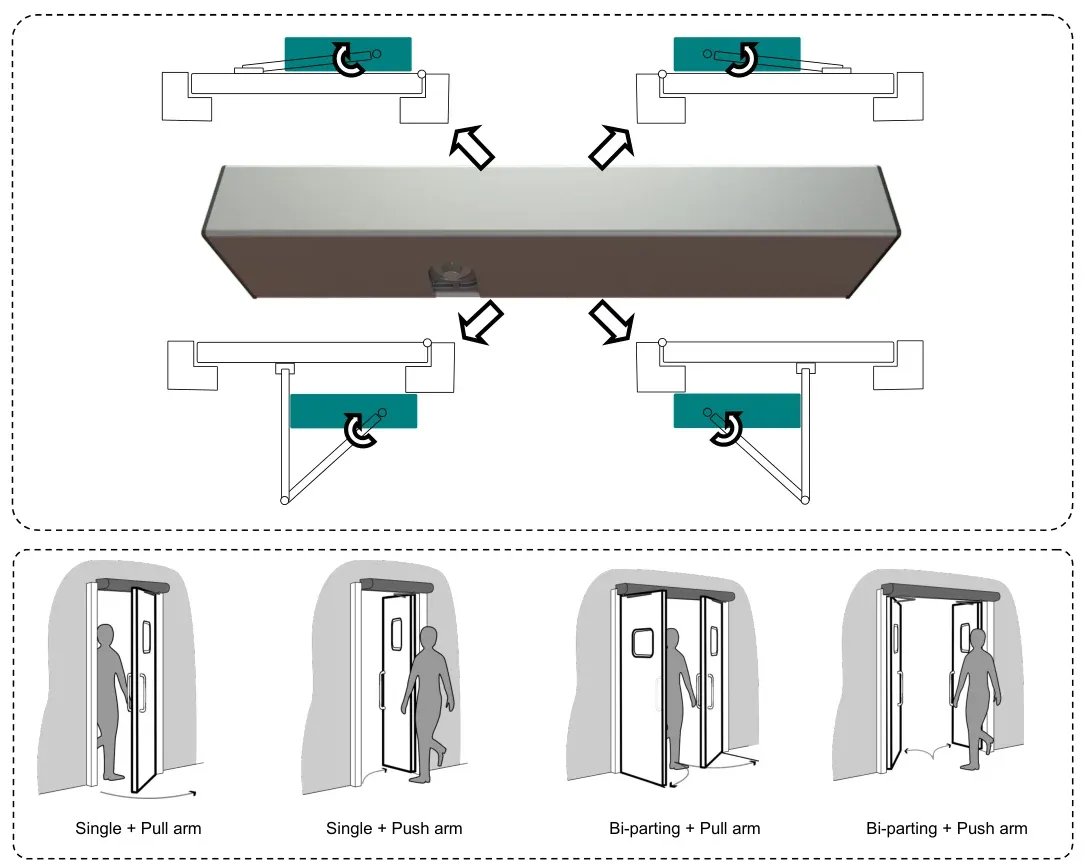
Рис. — Варіанти конфігурації: одностулкові + тяговий важіль, одностулкові + штовхаючий важіль, двостулкові + тяговий/штовхаючий важіль
Основні переваги:
- Компактний дизайн з мінімальним естетичним впливом
- Формальний та привабливий дизайн з приємними лініями
- Закриття дверей за допомогою пружини з моторним асистуванням у нормальному режимі
- Закриття за допомогою пружини у випадку відключення електроживлення
- Доступні режими Low Energy та Push&Go
- Легкий монтаж та моніторинг завдяки вбудованому подвійному дисплею
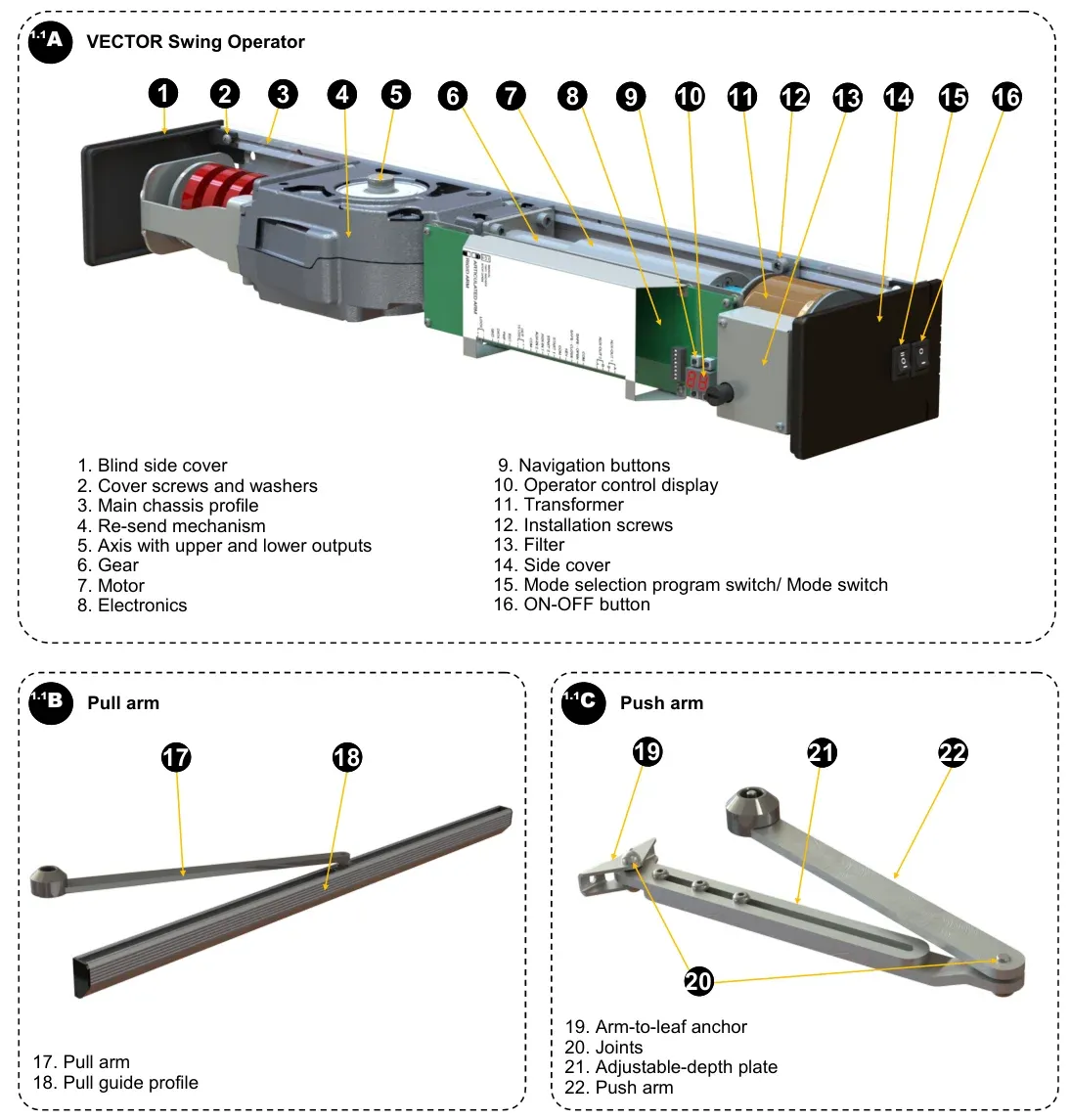
Рис. — Основні компоненти оператора VECTOR з нумерацією деталей
Перелік основних компонентів:
- Глуха бічна кришка
- Гвинти та шайби кришки
- Основний профіль шасі
- Механізм повернення
- Вал з верхнім та нижнім виходами
- Шестерня
- Двигун
- Електроніка
- Кнопки навігації
- Дисплей керування оператором
- Трансформатор
- Гвинти кріплення
- Фільтр
- Бічна кришка
- Перемикач вибору режиму
- Кнопка ON-OFF
- Тяговий важіль
- Профіль тягової напрямної
- Кріплення важеля до стулки
- Шарніри
- Пластина з регульованою глибиною
- Штовхаючий важіль
1.2 Опис символів
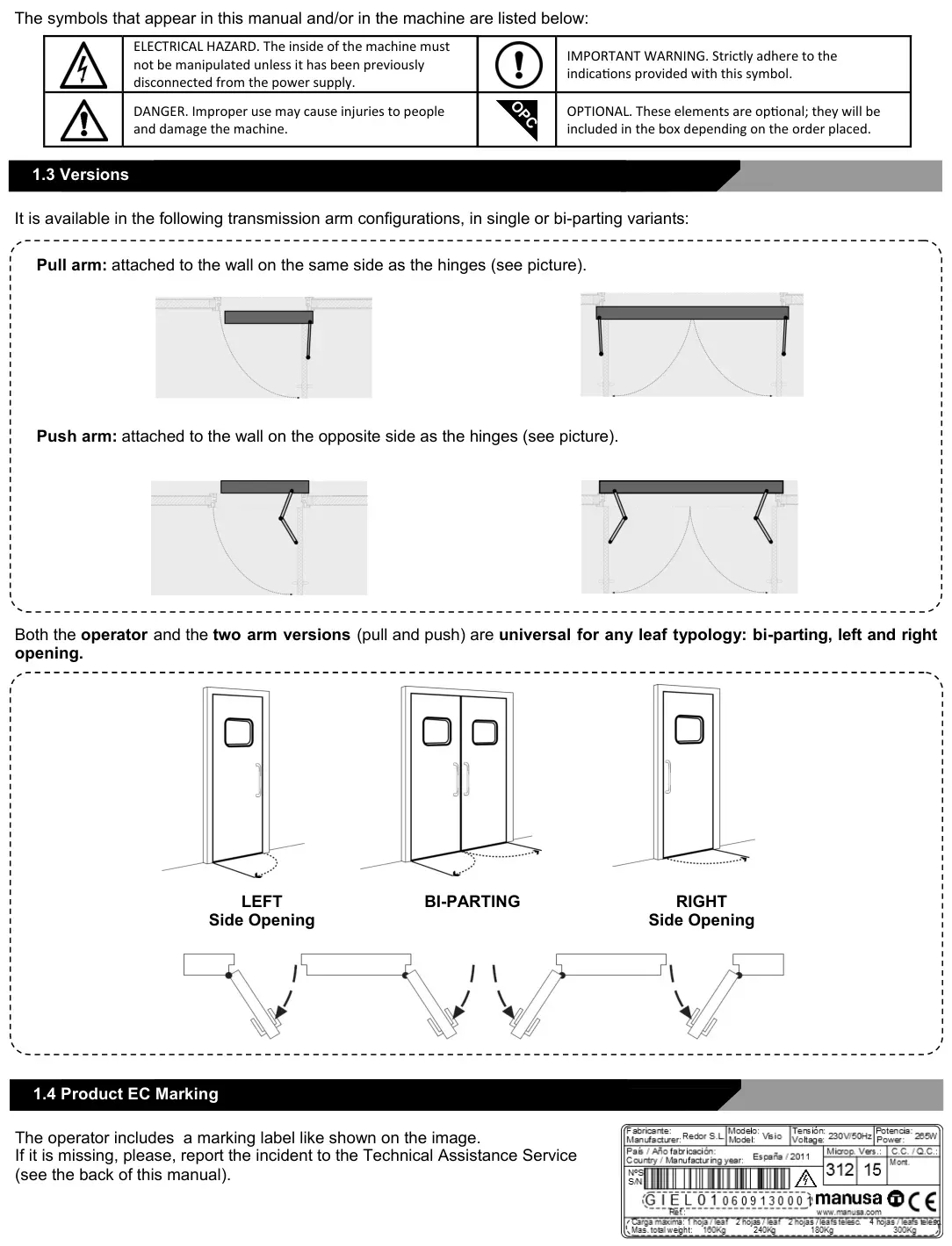
Рис. — Символи, що використовуються в інструкції
- ⚡ ЕЛЕКТРИЧНА НЕБЕЗПЕКА: Не торкайтеся внутрішніх частин пристрою без попереднього відключення від електромережі.
- ⚠ НЕБЕЗПЕКА: Неправильне використання може спричинити травмування людей та пошкодження обладнання.
- ❗ ВАЖЛИВЕ ПОПЕРЕДЖЕННЯ: Суворо дотримуйтесь вказівок, позначених цим символом.
- 🔧 ОПЦІОНАЛЬНО: Ці елементи є опціональними; вони включені в комплект залежно від замовлення.
1.3 Версії
Як оператор, так і обидві версії важелів (тяговий та штовхаючий) є універсальними для будь-якого типу стулки: двостулкові, ліве та праве відкривання.
Доступні наступні конфігурації важелів, в одностулковому або двостулковому варіанті:
- Тяговий важіль (Pull): кріпиться до стіни з того ж боку, що й петлі
- Штовхаючий важіль (Push): кріпиться до стіни з протилежного боку від петель
1.4 Маркування CE продукту
Оператор має маркувальну етикетку CE. Якщо вона відсутня — повідомте службу технічної підтримки.
1.5 Рівень шуму
Зважений рівень акустичного тиску випромінювань A становить нижче 70 дБ.
1.6 Випромінювання, гази, пари та пил
Пристрої manusa не виробляють жодного типу випромінювання, газів, парів або пилу.
1.7 Використання у вибухонебезпечних середовищах
Увага! Цей пристрій НЕ призначений для роботи у вибухонебезпечних та/або легкозаймистих середовищах.
1.8 Аксесуари
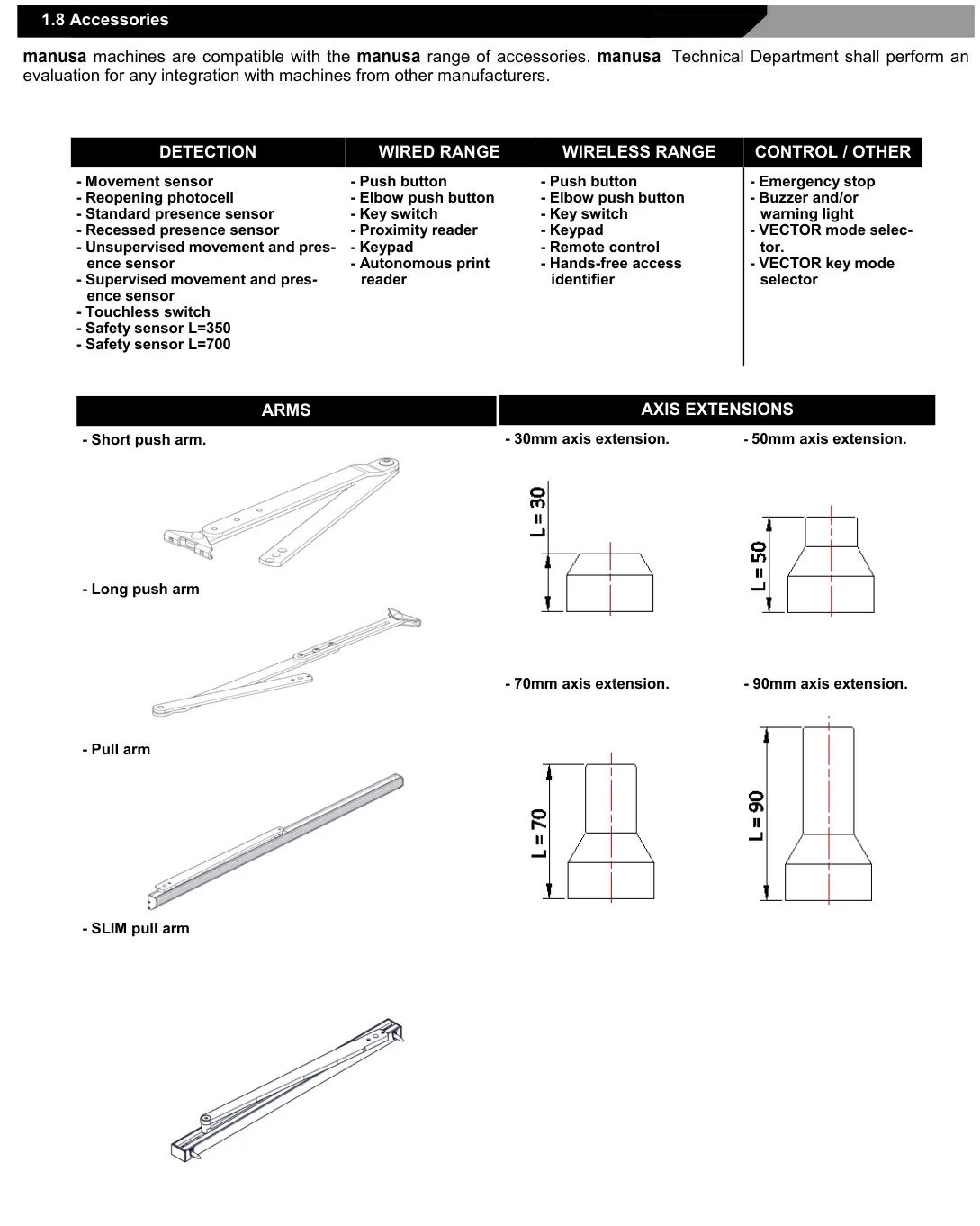
Рис. — Повний перелік сумісних аксесуарів
Подовжувачі осі: 30 мм, 50 мм, 70 мм, 90 мм
Дротовий діапазон: кнопка, ліктьова кнопка, ключ-вимикач, зчитувач наближення, клавіатура, зчитувач відбитків
Бездротовий діапазон: кнопка, ліктьова кнопка, ключ-вимикач, клавіатура, пульт дистанційного керування, ідентифікатор hands-free доступу
Детекція: датчик руху, фотоелемент повторного відкриття, стандартний датчик присутності, вбудований датчик присутності, контрольований/неконтрольований датчик руху та присутності, безконтактний вимикач, датчик безпеки L=350/L=700
Керування / Інше: аварійна зупинка, зумер/попереджувальне світло, перемикач режимів VECTOR
Важелі: короткий штовхаючий, довгий штовхаючий, тяговий, тяговий SLIM
Комплекти рам: для розпашних дверей P50 + тяговий Vector оператор (одностулковий / двостулковий)
Подвійний VECTOR: проміжний комплект кришки, спеціальна кришка (на замовлення)
2. Транспортування, зберігання та обслуговування
2.1 Умови доставки
Компанія manusa відповідає за початкову доставку пристрою. Переконайтеся, що всі деталі та компоненти прибули у належному стані: не зазнали стороннього втручання, жоден елемент не відсутній зі списку в накладній, не намокли та не постраждали від впливу навколишнього середовища. Якщо це не так — зафіксуйте це письмово у відповідній накладній та зверніться до manusa.
2.2 Умови транспортування
Для подальшого транспортування пристрій повинен завжди подорожувати належно упакованим та захищеним від зовнішніх впливів.
2.3 Умови зберігання
Якщо пристрій не буде встановлений негайно, забезпечте зберігання в місці, що відповідає наступним критеріям:
- Безпечне місце, захищене від ударів та недоступне для сторонніх осіб
- Пристрій має стояти на рівній, гладкій та міцній поверхні
- Місце, захищене від корозійних середовищ, атмосферних впливів, вологи, олій, парів тощо
3. Технічні характеристики
3.1 Загальні розміри

Рис. 1 — Загальні розміри оператора VECTOR
3.2 Технічні специфікації
Розпашний оператор manusa VECTOR забезпечує кінематичні характеристики найвищого рівня:
Механічні характеристики
- Габарити (В×Ш×Д): 89×130×675 мм (1 стулка) / 89×130×2800 мм (макс. 2 стулки)
- Максимальна вага стулки: 250 кг (див. Рис. 2)
- Час відкривання: 3 с (70°/с) ÷ 6 с (20°/с)
- Час закривання: 4 с (40°/с) ÷ 15 с (10°/с)
- Зусилля закривання (EN 1154): EN4 ÷ EN6 (див. Рис. 18)
- Максимальний кут відкривання: 110°
- Ширина дверної стулки: 700 ÷ 1400 мм
- Захист від защемлення: Автоматичне обмеження зусилля при наявності перешкод
- Вага: ≈ 11 кг
- Ступінь захисту: IP40
Електричні характеристики
- Живлення: 230 В ±10% змінного струму, 50/60 Гц
- Живлення (на замовлення): 115 В ±10% змінного струму, 50/60 Гц
- Номінальна потужність: 85 Вт
- Максимальний крутний момент на валу: 45 Нм
- Живлення зовнішніх пристроїв: 15 В постійного струму — макс. 12 Вт
- Робоча температура: від -10°C до +50°C
- Режим роботи: Безперервний
Робочий тиск
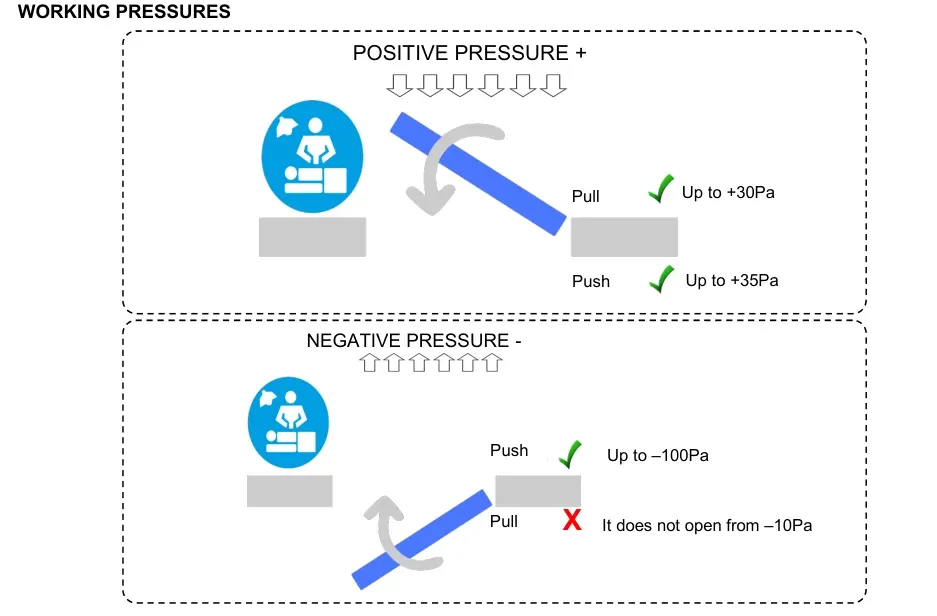
Рис. — Робочий тиск: позитивний та негативний для тягового (Pull) та штовхаючого (Push) важелів
- Тяговий (Pull) — До +35 Па: До −100 Па
- Штовхаючий (Push) — До +30 Па: Не відкривається від −10 Па
Відповідність стандартам
- Низька напруга 2014/35/CE
- Електромагнітна сумісність 2014/30/CE
- Будівельні вироби 2011/305/CE
- Безпека машин 2006/42/CE
- Безпека автоматичних дверей: EN 16005
Вогнестійкість EN-1634-1
Використання оператора VECTOR позитивно оцінене для застосування в дерев’яних/мінеральних дверних конструкціях — до 120 хвилин цілісності та ізоляції відповідно до EN 1634-1.
Термін служби: 10 років
3.3 Режим Low Energy (низька енергія)
Оператор може бути відрегульований в режимі Low Energy відповідно до стандарту EN 16005, завдяки наступним характеристикам:
- Зменшена динамічна сила на порозі дверей
- Обмежене зусилля оператора та обмежена швидкість
Важливо: Монтажник повинен перевірити відповідність монтажу Low Energy діючим стандартам. Захист закривальної кромки має бути оцінений індивідуально.
3.4 Експлуатація
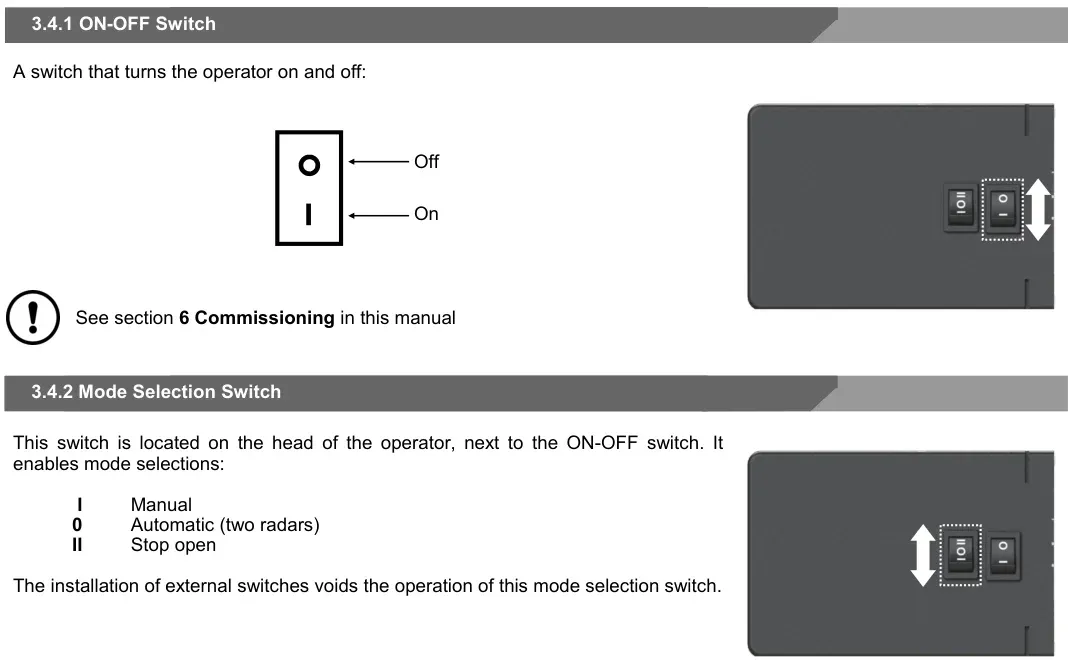
Рис. — Елементи керування: перемикач ON-OFF та перемикач вибору режиму
Двері manusa призначені для автоматичної роботи. Ручна робота передбачена тільки у випадку аварії та для виконання чистки, технічного обслуговування та регулювання.
3.4.1 Перемикач ON-OFF
Перемикач, що вмикає та вимикає оператор:
- Off — вимкнено
- On — увімкнено
3.4.2 Перемикач вибору режиму
Цей перемикач розташований на головній частині оператора, поруч з перемикачем ON-OFF. Дозволяє вибрати режим:
- I — Ручний
- 0 — Автоматичний (два радари)
- II — Зупинка у відкритому положенні
Примітка: Встановлення зовнішніх перемикачів скасовує роботу цього вбудованого перемикача вибору режиму.
3.5 Інструкції для техніка
- Ретельно дотримуйтесь інструкцій при монтажі оператора
- Цей продукт призначений та виготовлений виключно для цілей, зазначених у цьому посібнику. Будь-яке інше використання може пошкодити продукт та/або становити небезпеку
- manusa не несе відповідальності за недотримання правильних практик монтажу замків
- Від’єднайте електроживлення перед виконанням будь-якого типу втручання
- Не беріть продукт за пластикові заглушки або кришку
- Перевірте, що електрична установка має попередній автоматичний вимикач та належне заземлення
- Пристрої безпеки повинні відповідати стандарту EN 12978 та бути встановлені відповідно до EN 16005
3.6 Зняття з експлуатації, демонтаж та утилізація
Цей пристрій легко демонтується. Зняття з експлуатації не має особливих ускладнень. Демонтуйте блок, знімаючи різні елементи, та утилізуйте та переробляйте відходи відповідним чином.
3.7 Призначене використання та використання, якого слід уникати
Призначене використання оператора VECTOR — автоматизація розпашних дверей, призначених для пішохідного доступу.
Заборонене використання:
- Не модифікуйте пристрій або будь-які його компоненти
- Не від’єднуйте, не маніпулюйте та не виводьте з ладу компоненти безпеки пристрою
- Не допускайте неавторизованих техніків до роботи з пристроєм
- Не використовуйте неоригінальні запасні частини
- Не використовуйте жодну частину пристрою як опору для предметів та людей
- Не дозволяйте дітям гратися з пристроєм
3.8 Обмеження застосування
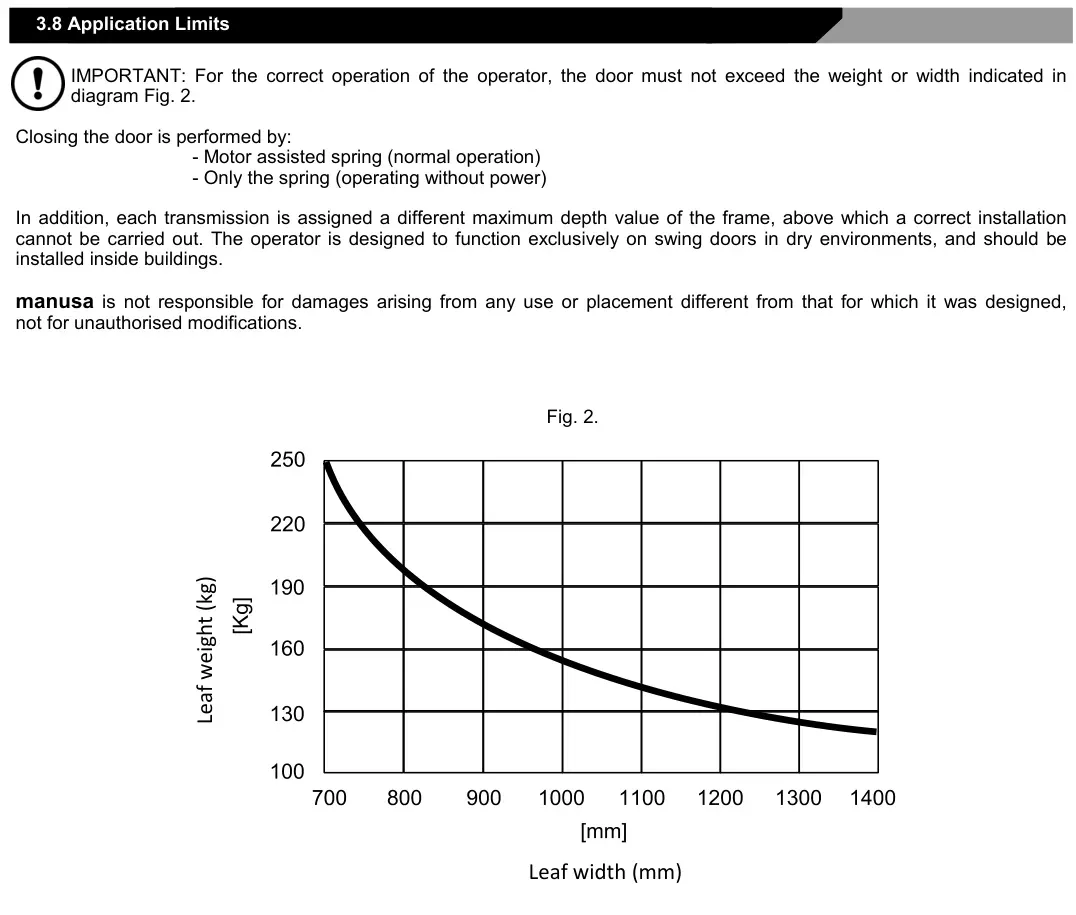
Рис. 2 — Діаграма: допустима вага стулки залежно від ширини
ВАЖЛИВО: Для правильної роботи оператора двері не повинні перевищувати вагу або ширину, вказані на діаграмі Рис. 2.
Закриття дверей виконується:
- Пружиною з моторним асистуванням (нормальна робота)
- Тільки пружиною (робота без електроживлення)
Оператор призначений для функціонування виключно на розпашних дверях у сухих середовищах та повинен бути встановлений усередині будівель.
4. Підготовка до монтажу
4.1 Вимоги до кваліфікації монтажників
Монтаж пристроїв manusa, а також будь-яке інше втручання для обслуговування, регулювання тощо повинно виконуватися кваліфікованим технічним персоналом, який відповідає наступним вимогам:
- Вміння користуватися обладнанням для обслуговування та/або підйомним обладнанням
- Здатність правильно обробляти вантажі
- Вміння використовувати засоби індивідуального захисту (ЗІЗ)
- Знання інструкцій з регулювання низької напруги
- Технічні знання продуктів manusa
- Знання стандартів, що застосовуються до продуктів та послуг
4.2 Фізичні та екологічні вимоги
Розпашний оператор VECTOR має бути встановлений у місцях, що відповідають наступним вимогам:
- Гладка, рівна підлога
- Гладка, рівна стіна з достатньою несучою здатністю, придатна для кріплення рами
- Зона, вільна від ударів та вібрацій
- Температура навколишнього середовища: від -15°C до +50°C
- Не піддавати прямому сонячному світлу
- Не піддавати дощу або надмірній вологості
ТИСК: У приміщеннях, де розпашні двері встановлюються між двома зонами з різним тиском, рекомендується планувати та встановлювати двері так, щоб позитивний тиск завжди діяв у напрямку закриття стулки, допомагаючи підтримувати закрите положення.
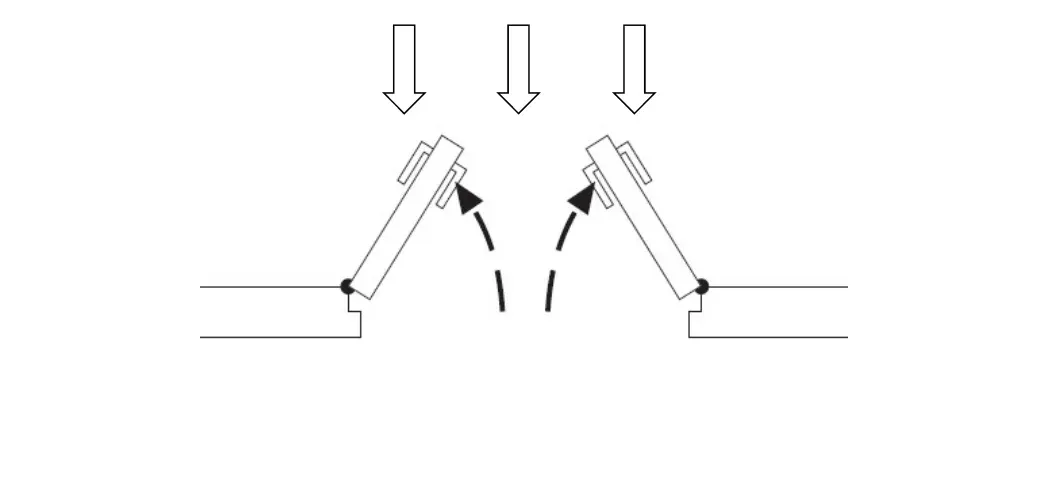
Рис. — Рекомендоване розташування дверей відносно напрямку тиску
4.3 Вимоги до електричної передмонтажної підготовки
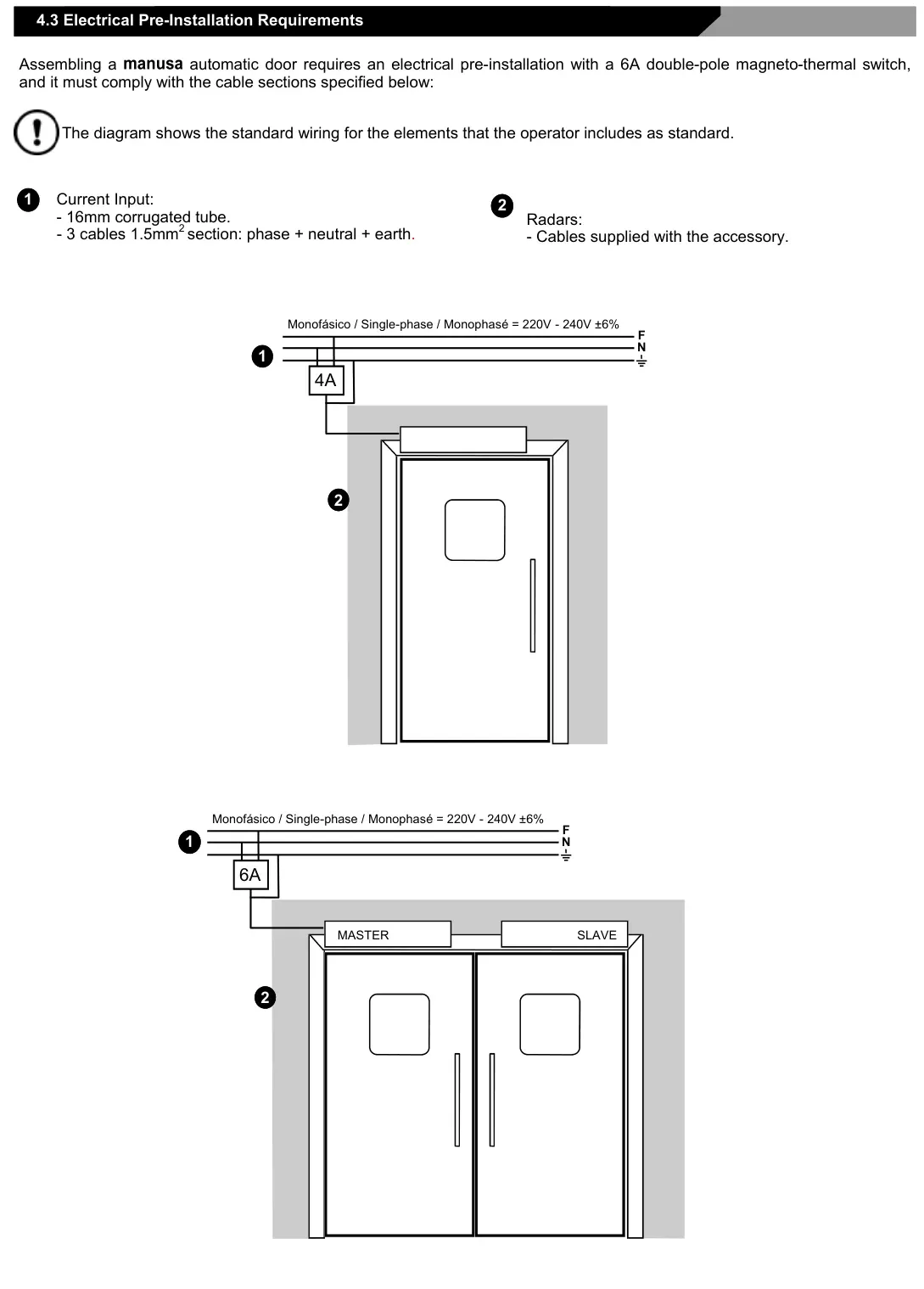
Рис. — Стандартна схема проводки для елементів оператора
Монтаж автоматичних дверей manusa вимагає електричної підготовки з двополюсним магнітотермічним вимикачем 6A, а також дотримання наступних перетинів кабелів:
Вхід струму:
- Гофрована труба 16 мм
- 3 кабелі з перетином 1,5 мм²: фаза + нейтраль + заземлення
Радари: Кабелі постачаються з аксесуаром.
5. Монтаж
5.1 Типи важелів, які можна встановити
- ЖОРСТКИЙ ВАЖІЛЬ (Rigid): використовується, коли оператор встановлений з того ж боку, що й відкриваються двері
- СТАНДАРТНИЙ ШАРНІРНИЙ ВАЖІЛЬ (Push): може бути встановлений для штовхання. Використовується, коли оператор встановлений з протилежного боку від відкриття дверей
- ДОВГИЙ ШАРНІРНИЙ ВАЖІЛЬ (Push): використовується, коли оператор встановлений з протилежного боку від відкриття дверей, де дверний лутковий брус особливо глибокий
5.2 Встановлення оператора
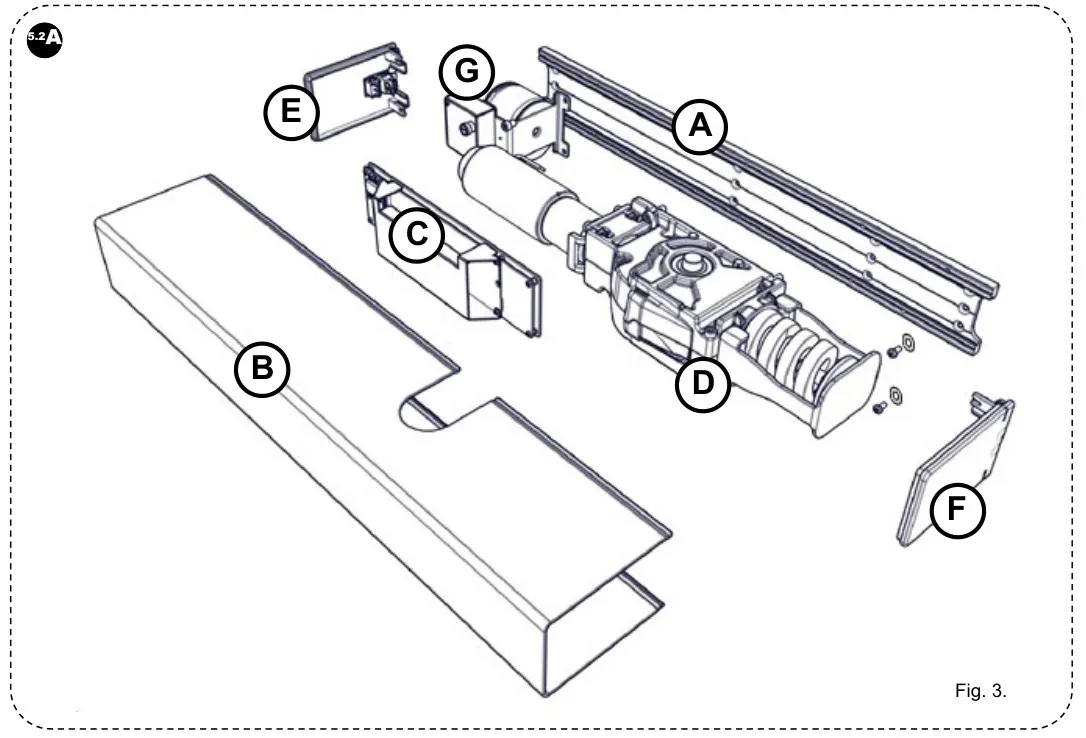
Рис. 3 — Порядок розбирання та кріплення основного профілю оператора
Для кріплення оператора виконайте наступні кроки (Рис. 3):
- Зніміть основну кришку (B)
- Від’єднайте всі з’єднання (клавіатура, перемикач, трансформатор, двигун) на електронній платі (C), відкрутіть 2 гвинти та зніміть плату
- Відкрутіть та зніміть 2 кріпильні гвинти трансформатора (G)
- Відкрутіть та зніміть 4 кріпильні гвинти групи мотор-редуктора (D)
- Зніміть дві торцеві кришки (E) та (F)
- Прикріпіть основний екструдований профіль (A) до стіни згідно з інструкціями у відповідних розділах
- Зберіть усі компоненти, за винятком торцевих кришок та основної кришки, виконуючи вищезазначені кроки у зворотному порядку
Порада: При повторному збиранні для полегшення монтажу спочатку затягніть два нижні кріпильні гвинти групи мотор-редуктора, потім спертися на них та затягнути інші два так, щоб кінець вала мотор-редуктора був перпендикулярний до верхнього профілю стулки.
УВАГА: Для правильного монтажу зверніться до відповідних розділів «Монтаж важелів».
5.3 Рівні позиціонування кріпильних отворів
Зробіть відповідні отвори для типу кріпильного гвинта, що використовується, тільки після перевірки «Рівнів позиціонування», зазначених у розділах, що відповідають типу важеля. У випадку подвійного оператора підготуйте з’єднання (кабельні маршрути) між двома окремими операторами.
5.4 Монтаж висувного жорсткого важеля
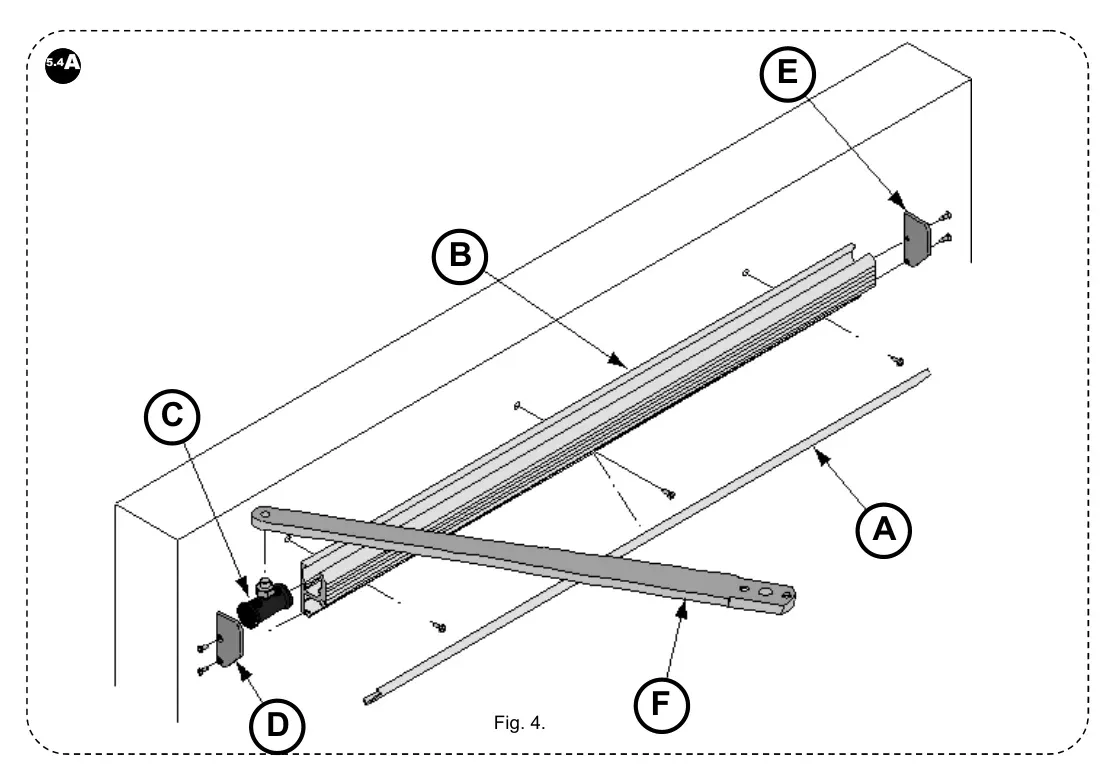
Рис. 4 — Компоненти жорсткого важеля та напрямної
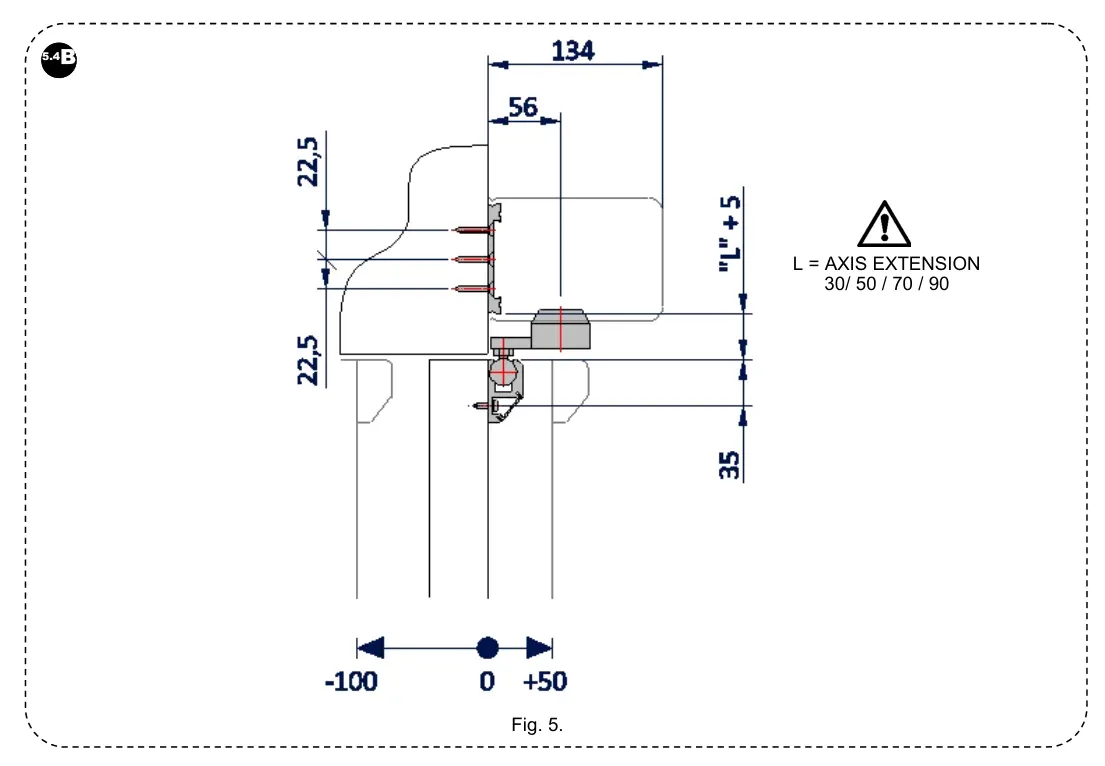
Рис. 5 — Рівні позиціонування кріпильних отворів
Жорсткий важіль використовується, коли оператор встановлений з того ж боку, що й відкриваються двері.
УВАГА: Для правильного розміщення оператора завжди використовуйте як основну точку відліку вісь петель стулки та привідний вал мотор-редуктора (див. Рис. 6 та Рис. 7).
УВАГА: Остаточне затягування гвинтів слід виконувати тільки після того, як ви переконалися, що оператор розміщений вертикально, а петлі та привідний вал мотор-редуктора ідеально паралельні.
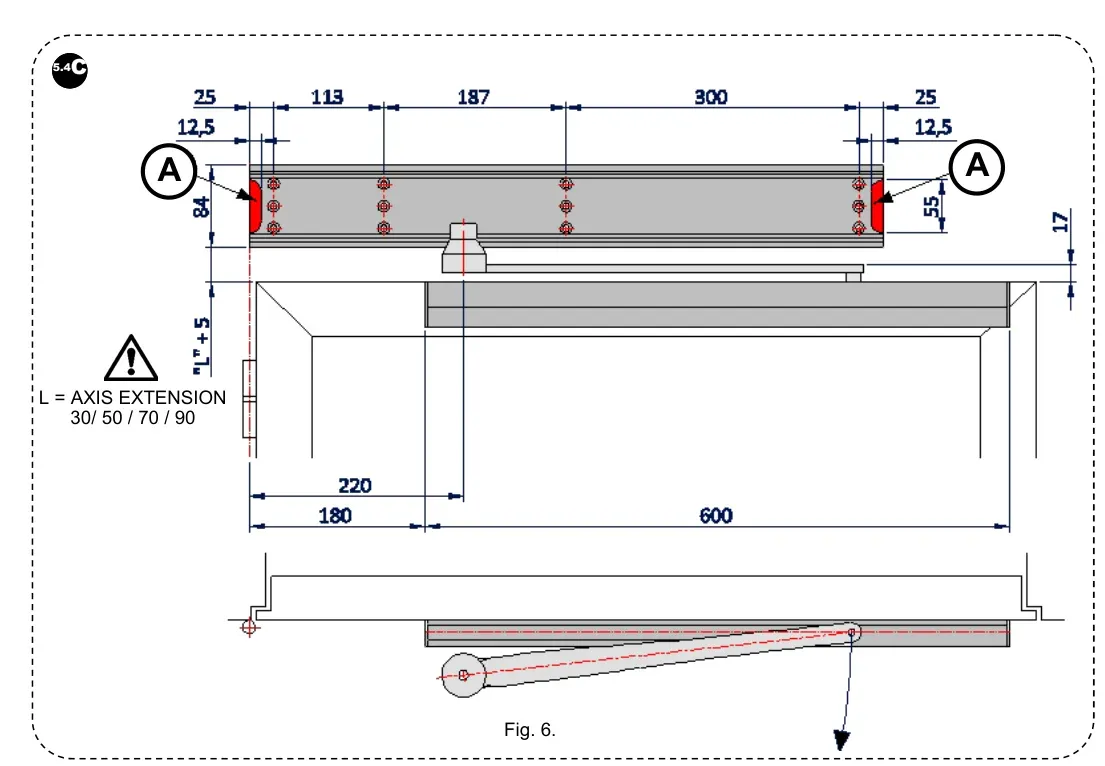
Рис. 6 — Позиціонування для ліво-відкриваних дверей (жорсткий важіль)
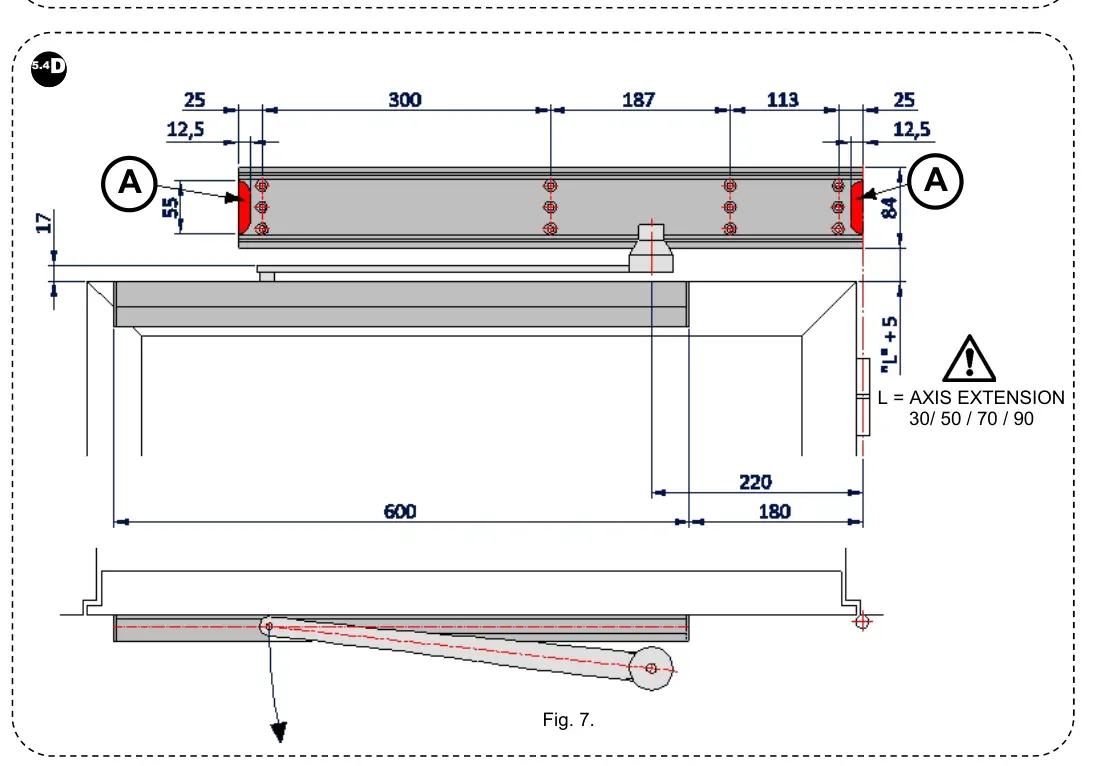
Рис. 7 — Позиціонування для право-відкриваних дверей (жорсткий важіль)
Покрокова інструкція:
- Зніміть кришку (Рис. 4, частина A) з основного профілю напрямної (Рис. 4, частина B)
- Розмістіть профіль напрямної (B) горизонтально, дотримуючись рівнів позиціонування (Рис. 5, 6, 7)
- Зробіть щонайменше 4 отвори, що збігаються з позначкою «V» на профілі напрямної, та прикріпіть його
- Встановіть повзунок (C) у напрямну (B)
- Затягніть гайку (Рис. 8, A) для попереднього навантаження пружини до збігу кінців пластини (Рис. 8, B) з лінією початку діапазону EN4 (рівень L=0)
- При закритих дверях знайдіть положення для введення важеля (Рис. 9, A) так, щоб кінці важеля (Рис. 4, F) збігалися з віссю штифта повзунка (Рис. 4, C)
- Зніміть важіль, вийміть з’єднання важеля та поверніть його (Рис. 9, A) на 1-2 зуби в бік закриття стулки (Рис. 10). Потім вставте вихідну вісь назад
- Вставте шайбу (Рис. 9, B) та затягніть гвинт (Рис. 9, C)
- Злегка відкрутіть гвинт натягу пружини (Рис. 8, A)
- Вставте важіль (Рис. 9, D) у паз з’єднання важеля та затягніть два гвинти (Рис. 9, E)
- Злегка відкрийте двері та поверніть жорсткий важіль до збігу осі повзунка (Рис. 4, C) з кінцем жорсткого важеля
- Прикрутіть різьбовий кінець штифта (Рис. 4, C) до жорсткого важеля (Рис. 4, F)
- Закрийте кришку напрямної та торцеві кришки з відповідними гвинтами та шайбами
- Відрегулюйте пружину (див. розділ «Регулювання пружини»)
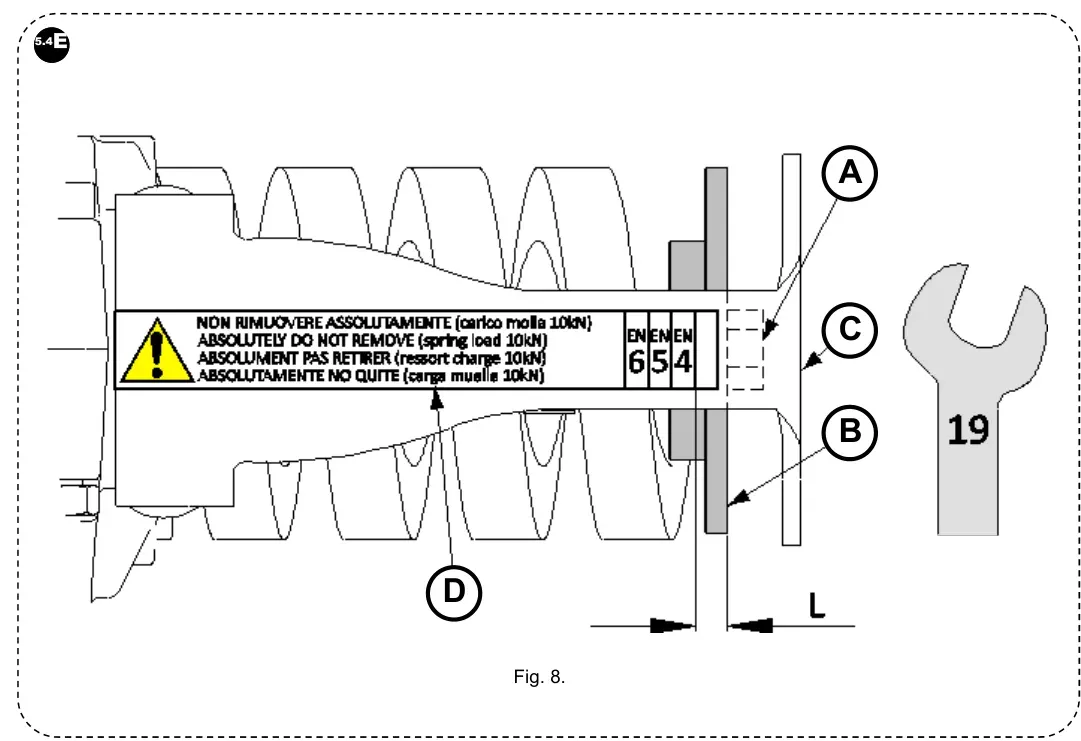
Рис. 8 — Регулювання пружини
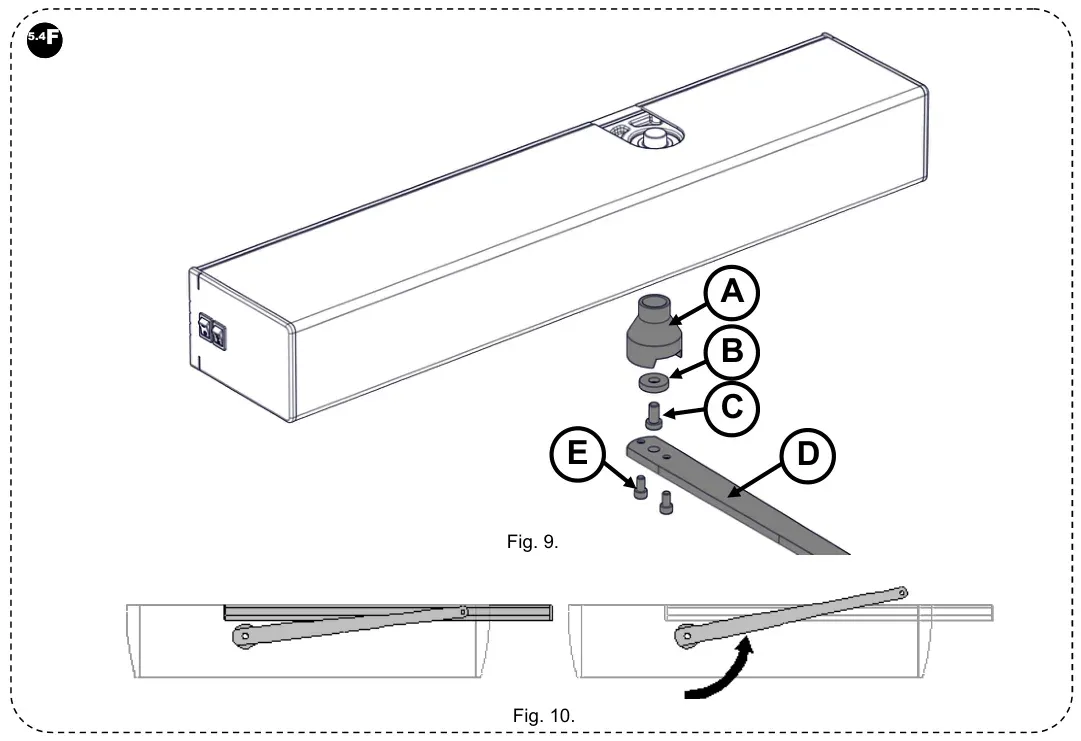
Рис. 9 — Монтаж з’єднання важеля
Рис. 10 — Обертання важеля при встановленні
5.4.1 Монтаж напрямної важеля SLIM
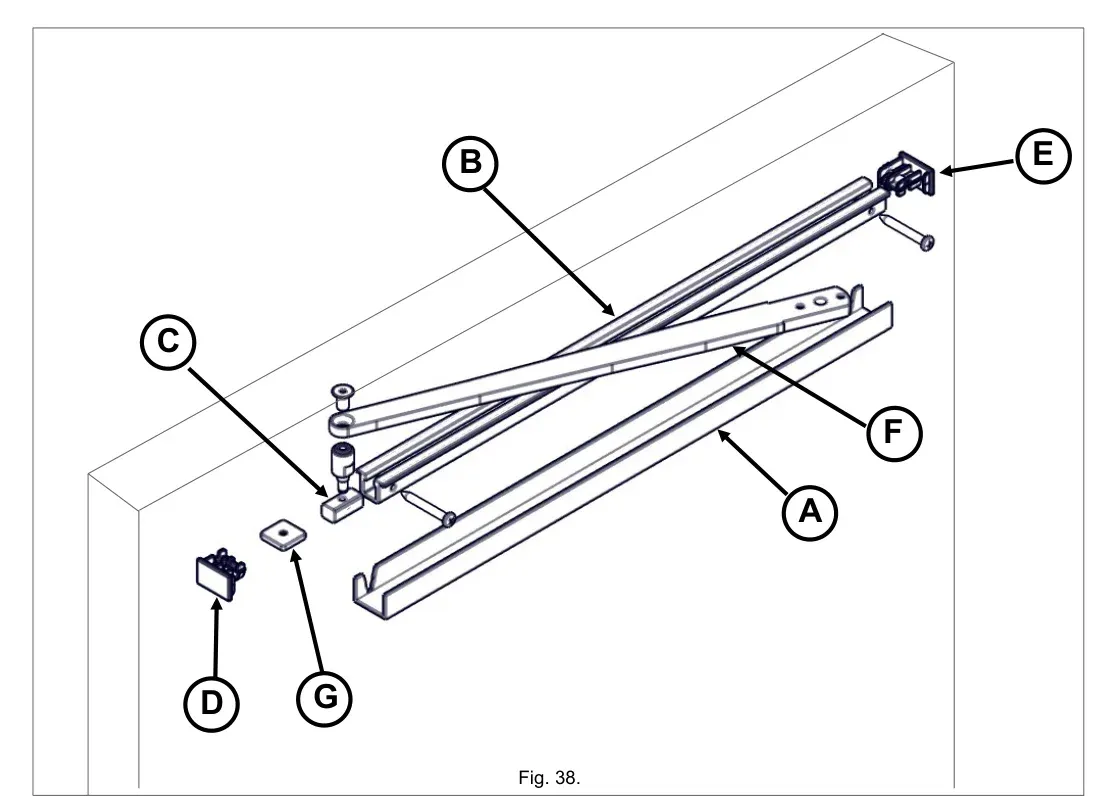
Рис. 38 — Компоненти напрямної SLIM важеля
Процедура аналогічна стандартному жорсткому важелю з деякими відмінностями у конструкції напрямної.
5.5 Монтаж штовхаючого шарнірного важеля
Штовхаючий шарнірний важіль використовується, коли оператор встановлений з протилежного боку від відкриття дверей.
УВАГА: Для правильного розміщення завжди використовуйте як основну точку відліку вісь петель стулки та привідний вал двигуна (див. Рис. 12, 13, 14).
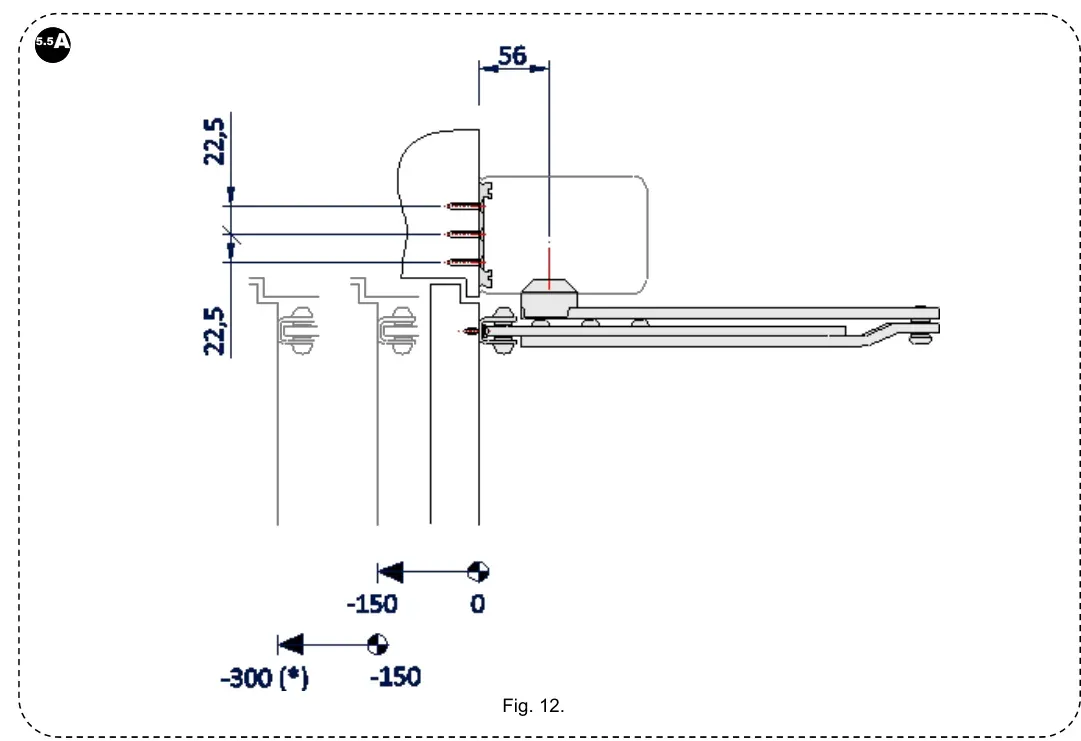
Рис. 12 — Позиціонування штовхаючого важеля (бічний вигляд)
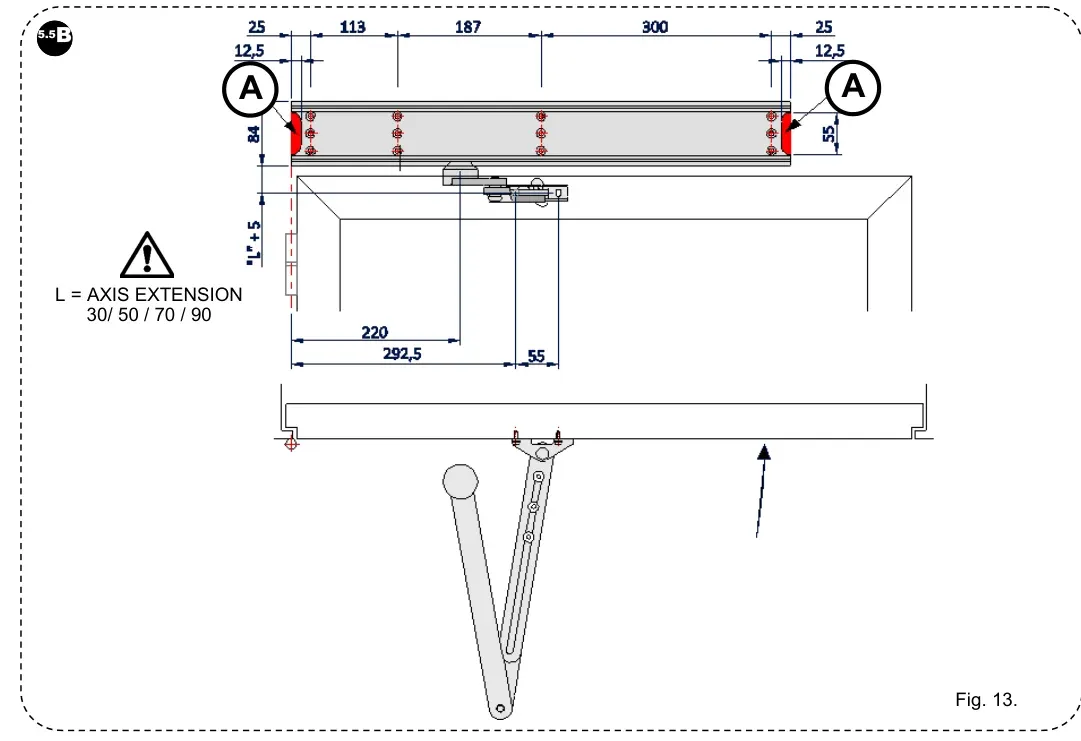
Рис. 13 — Позиціонування для ліво-відкриваних дверей зі штовхаючим важелем
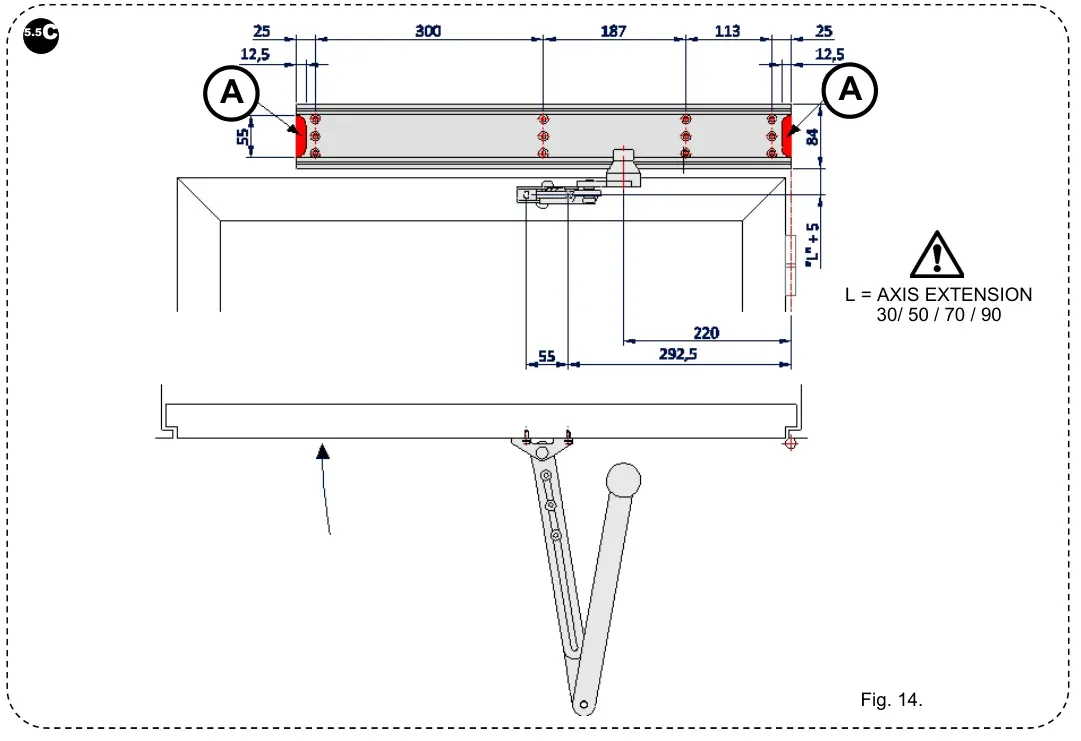
Рис. 14 — Позиціонування для право-відкриваних дверей зі штовхаючим важелем
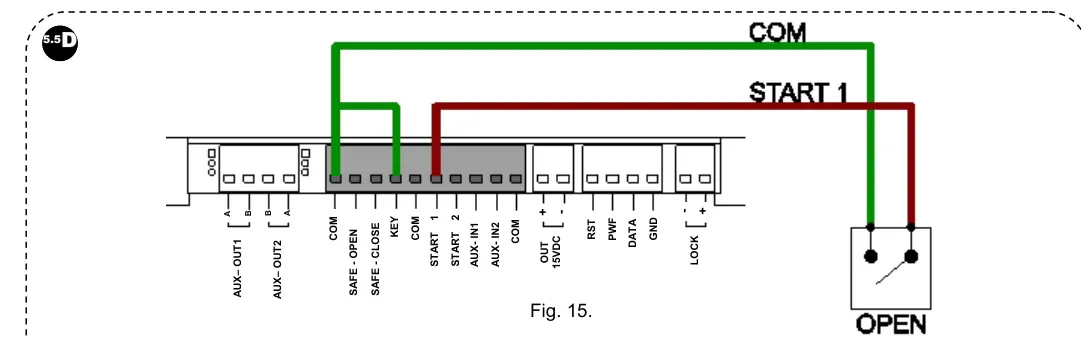
Рис. 15 — Компоненти шарнірного важеля
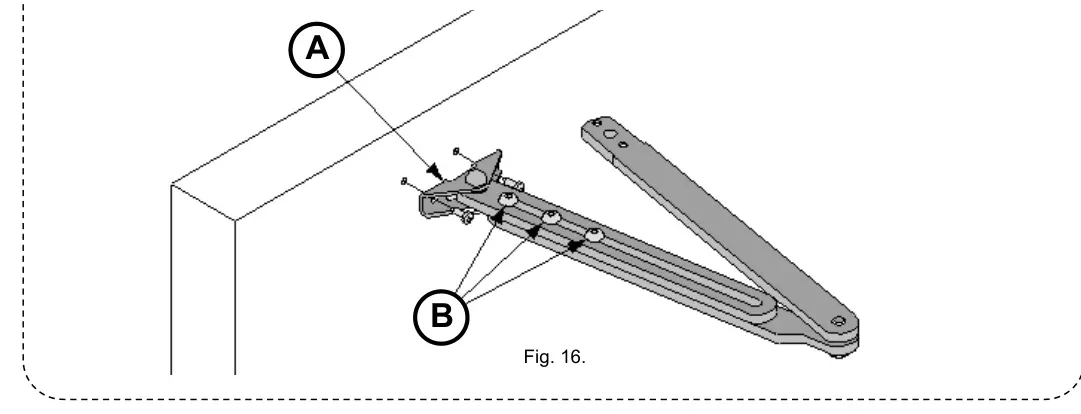
Рис. 16 — Деталі кріплення шарнірного важеля до стулки
5.5.1 Кріплення важеля до стулки
- Поставте шайбу (Рис. 9, B) та гвинт (Рис. 9, C) на точку з’єднання з важелем (Рис. 9, A)
- Встановіть першу частину шарнірного важеля (Рис. 15, D) у порожнину з’єднання та затягніть гвинти
- Відкрутіть три гвинти M8×16 (Рис. 16, B) для відділення частини, що кріпиться до стулки
- Зробіть отвори у дверях відповідно до Рис. 12 та Рис. 13
- Прикріпіть частину шарнірного важеля до дверної стулки відповідними гвинтами
Примітка: Перед затягуванням з’єднання важеля до осі оператора перевірте, що відстань між напрямною та верхньою стороною важеля становить приблизно 17 мм.
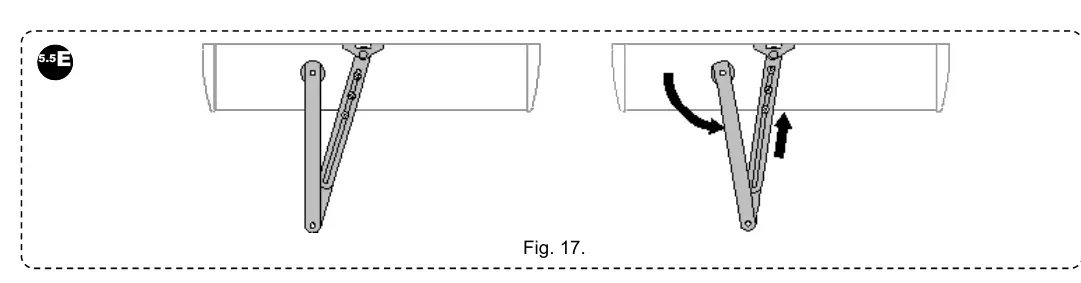
Рис. 17 — Фіксація шарнірного важеля у перпендикулярному положенні
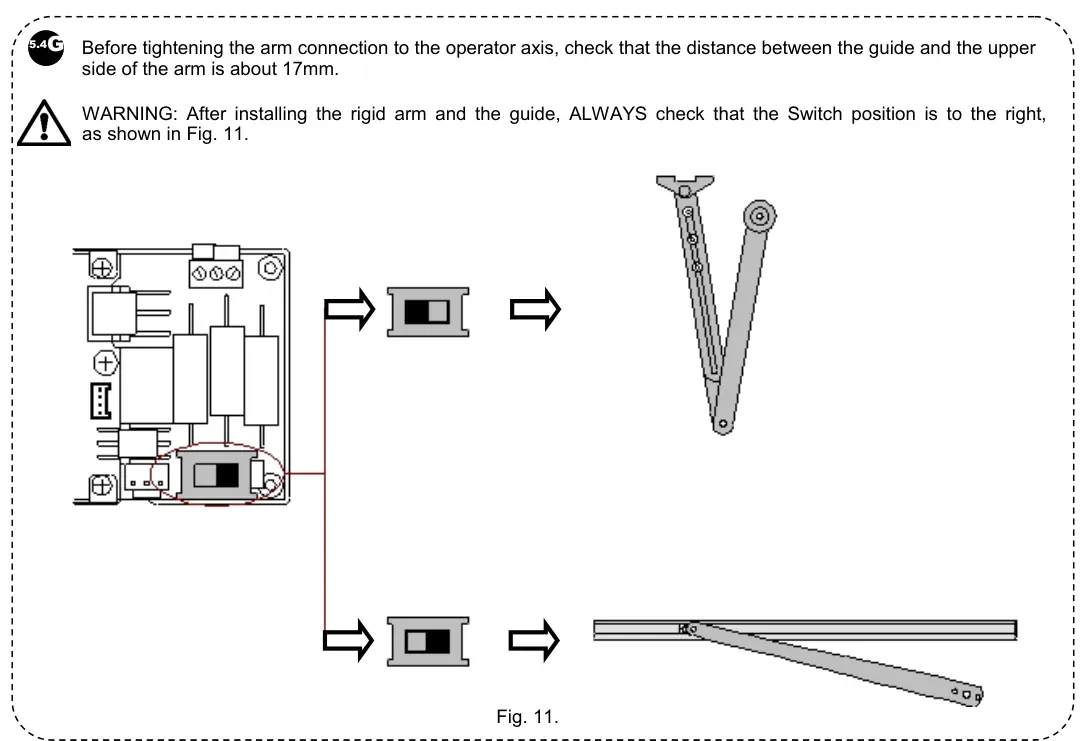
Рис. 11 — Положення перемикача: праворуч для жорсткого, ліворуч для шарнірного важеля
Завершальні кроки:
- Затягніть гайку (Рис. 8, A) для попереднього навантаження пружини до рівня EN4 (L=0)
- Встановіть з’єднання важеля (Рис. 9, A) на вихідну вісь оператора так, щоб перша частина важеля була перпендикулярна до поверхні монтажу
- Затягніть гвинт (Рис. 9, C) для фіксації
- Вкрутіть три гвинти M8×16 (Рис. 16, B) без затягування
- При закритій стулці поверніть частину важеля для легкого стиснення пружини (Рис. 17)
- Зафіксуйте регулювання, міцно затягнувши гвинти
- Відрегулюйте пружину (див. розділ «Регулювання пружини»)
УВАГА: Після монтажу жорсткого важеля та напрямної ЗАВЖДИ перевіряйте, що перемикач знаходиться у правильному положенні відповідно до Рис. 11 — праворуч для жорсткого важеля, ліворуч для шарнірного.
5.6 Регулювання пружини
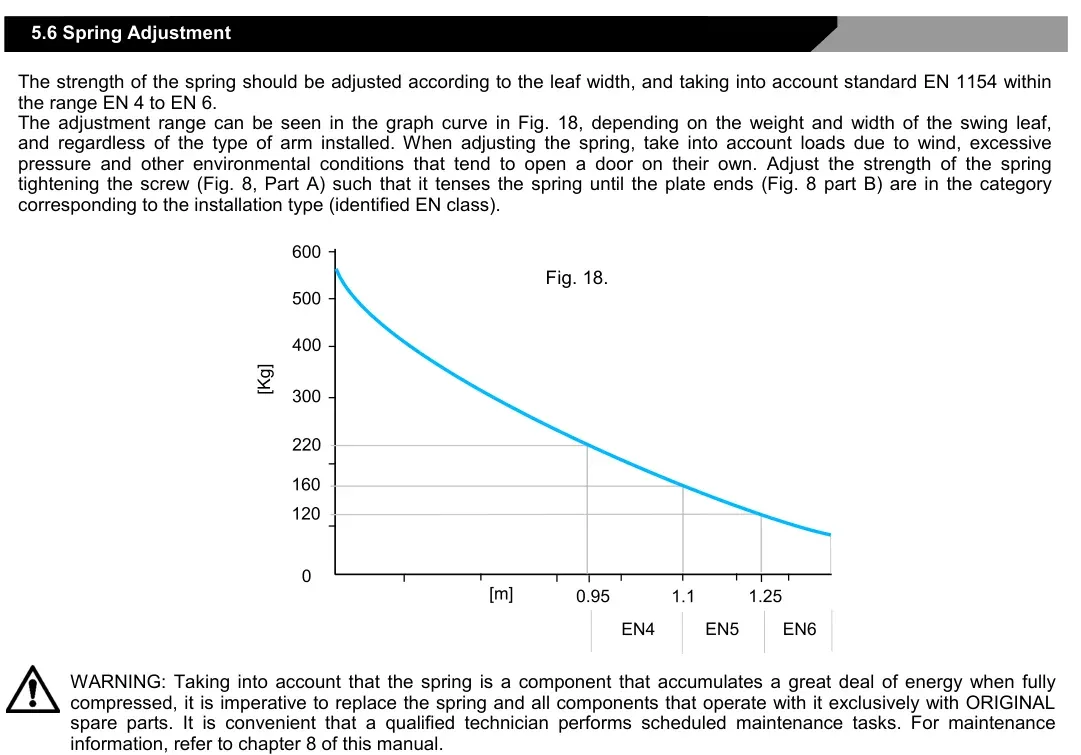
Рис. 18 — Графік регулювання зусилля пружини залежно від ваги та ширини стулки
Зусилля пружини має бути відрегульоване відповідно до ширини стулки та з урахуванням стандарту EN 1154 у діапазоні EN 4 — EN 6.
Діапазон регулювання можна побачити на графіку (Рис. 18). При регулюванні пружини враховуйте навантаження від вітру, надмірного тиску та інших умов середовища.
Затягуйте гвинт (Рис. 8, A) для натягу пружини до відповідної категорії (клас EN).
УВАГА: Пружина — це компонент, що накопичує велику кількість енергії при повному стисненні. Обов’язково замінюйте пружину та всі пов’язані компоненти виключно ОРИГІНАЛЬНИМИ запасними частинами. Планове технічне обслуговування має виконувати кваліфікований технік.
5.7 Вибір рівня гальмування без живлення
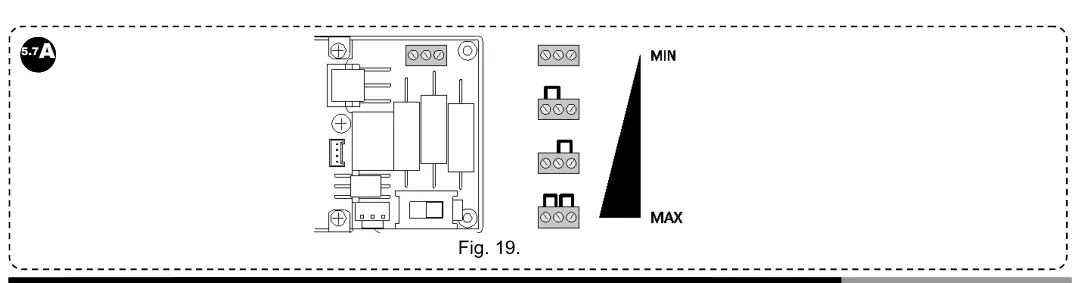
Рис. 19 — Вибір рівня гальмування без живлення
Відрегулюйте рівень гальмування відповідно до швидкості закриття та розмірів/ваги стулки (Рис. 19). Перевірте роботу, відкривши двері вручну та закривши їх пружиною при відсутності живлення.
5.8 Перевірка перед підключенням
Перед виконанням електричного підключення очистіть сліди пилу або залишків та перевірте:
- Оператор правильно закріплений на стіні
- Усі гвинти затягнуті
- Проводка перевірена — жоден кабель не знаходиться поблизу рухомих частин
- Важіль правильно прикріплений до стулки
- Головки правильно встановлені та зафіксовані на основі
УВАГА: Перевірте захисний кронштейн пружини (Рис. 8, C) та переконайтеся, що наклейка з пломбою від несанкціонованого доступу (Рис. 8, D) не була видалена.
5.9 Підключення до електромережі
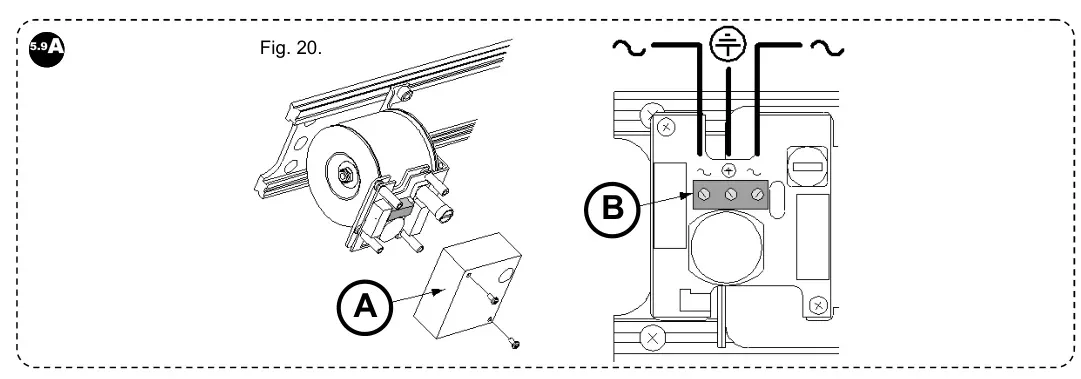
Рис. 20 — Підключення живлення до оператора

Рис. 21 — Схема розподілу зон підключення сенсорів
- Прокладіть силовий кабель до внутрішньої частини оператора, не пошкоджуючи його на металевих краях
- Відкрийте кришку (Рис. 20, A)
- Підключіть мережеве живлення та кабель заземлення до клемних пластин (Рис. 20, B)
- Поставте кришку на місце
УВАГА: Не інвертуйте кабелі живлення та заземлення! Повинна бути можливість розірвати живлення від розподільної коробки за допомогою двополюсного вимикача з мінімальним розмиканням контактів 3 мм (не входить у комплект).
УВАГА: Усі операції з підключення на клемних пластинах плати або периферійних пристроях повинні виконуватися при відключеному живленні для уникнення необоротних електричних пошкоджень.
5.10 Електронна плата VECTOR
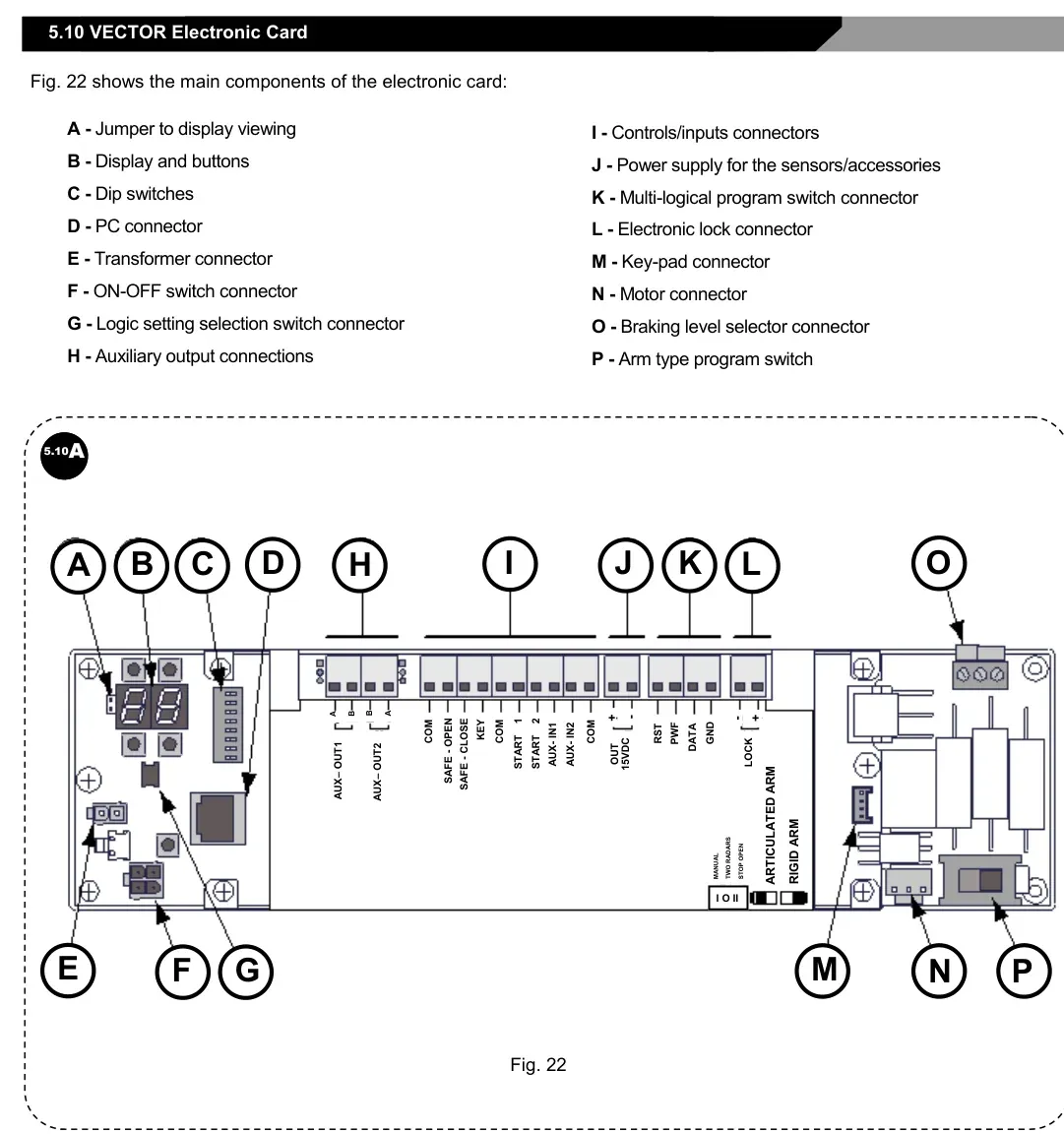
Рис. 22 — Основні компоненти електронної плати
Основні компоненти електронної плати (Рис. 22):
- A: Джампер для перегляду дисплея
- B: Дисплей та кнопки
- C: DIP-перемикачі
- D: Роз’єм для ПК
- E: Роз’єм трансформатора
- F: Роз’єм перемикача ON-OFF
- G: Роз’єм перемикача вибору логічних налаштувань
- H: Допоміжні вихідні з’єднання
- I: Роз’єми входів керування
- J: Живлення сенсорів/аксесуарів
- K: Роз’єм мультилогічного перемикача програм
- L: Роз’єм електронного замка
- M: Роз’єм клавіатури
- N: Роз’єм двигуна
- O: Роз’єм вибору рівня гальмування
- P: Перемикач програми типу важеля
5.11 Електронні підключення
Підключіть до електронної плати (Рис. 22):
- Роз’єм перемикача логічних налаштувань [H]
- Роз’єм перемикача ON-OFF [G]
- Роз’єм трансформатора [E]
- Роз’єм двигуна [O]
- Роз’єм клавіатури [N]
5.12 Вибір типу важеля
Жорсткий важіль (ліво- або правостулкові двері) → Налаштуйте правий перемикач програм відповідно до Рис. 11.
Шарнірний важіль (ліво- та правостулкові двері) → Налаштуйте лівий перемикач програм відповідно до Рис. 11.
5.13 Підключення входів керування
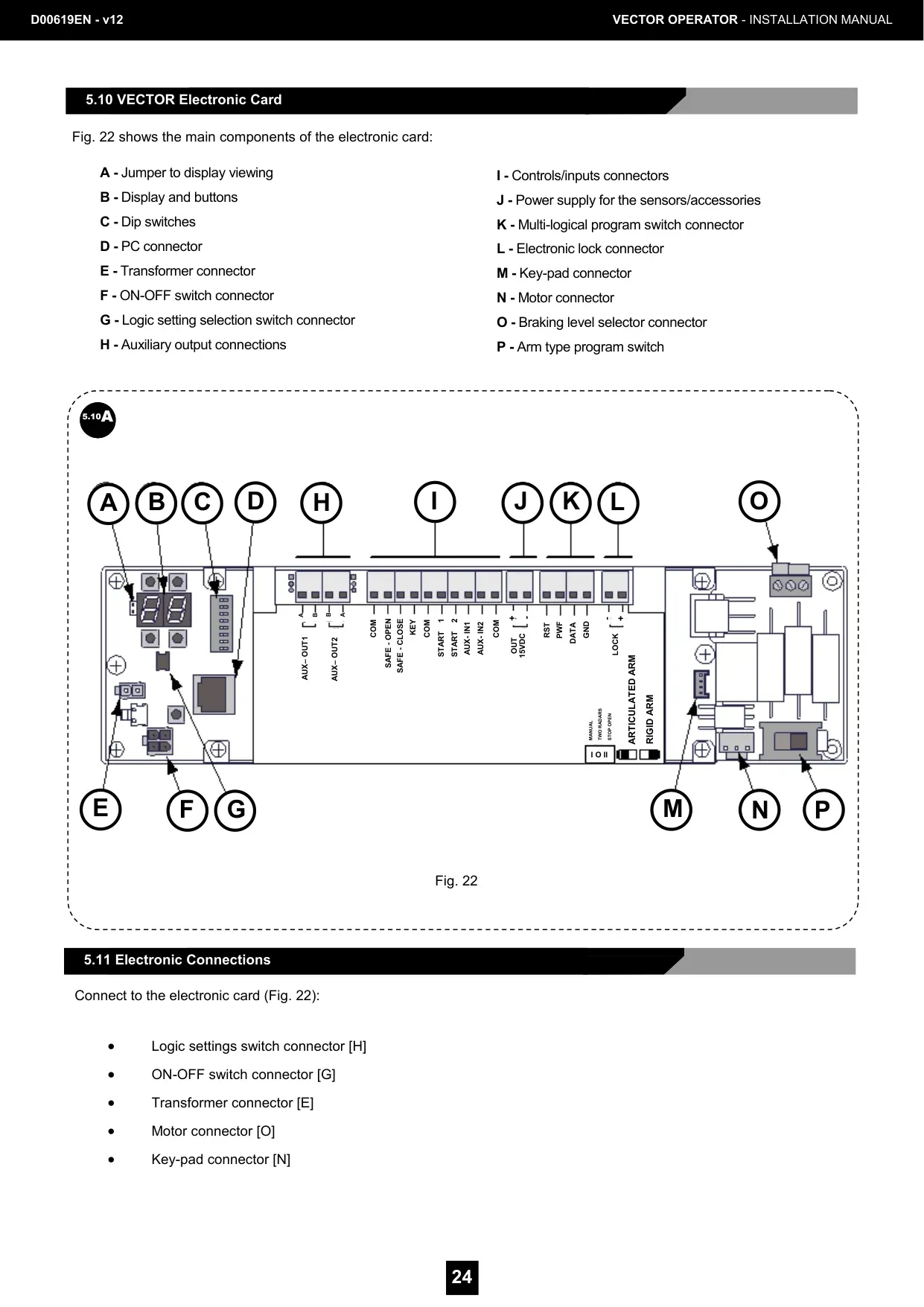
Рис. — Схема підключення входів керування
- KEY (НЗ): Сигнал блокування — При активації центральний блок контролює повне закриття стулки. Доки сигнал активний — двері залишаються закритими та не реагують на зовнішні пристрої. Має бути з’єднаний з COM, якщо пристрої не підключені.
- START 1 (НВ): Сигнал відкриття — Кінець сигналу спричиняє відкриття стулок. Контролюється тільки в режимі «2 радари».
- START 2 (НВ): Сигнал відкриття — Кінець сигналу спричиняє відкриття стулок. Контролюється як в режимі «2 радари», так і «1 радар».
- SAFE OPEN (НЗ): Безпека при відкриванні — Якщо контакт розімкнутий під час відкриття — рух негайно зупиняється. Має бути з’єднаний з COM, якщо не підключені пристрої.
- SAFE CLOSE (НЗ): Безпека при закриванні — Якщо контакт розімкнутий під час закриття — негайний зворотний рух. Має бути з’єднаний з COM, якщо не підключені пристрої.
- COM (—): Загальний — Спільний контакт для електричних сигналів.
- AUX IN 1/2 (НВ): Допоміжний вхід — Конфігурується (0-11): відкриття для інвалідів, аварійне відкриття, блокування, зворотний зв’язок замка, режим очікування, покроковий режим, пожежна тривога, ручний режим тощо.
НВ = Нормально Відкритий, НЗ = Нормально Закритий
5.14 Допоміжні виходи
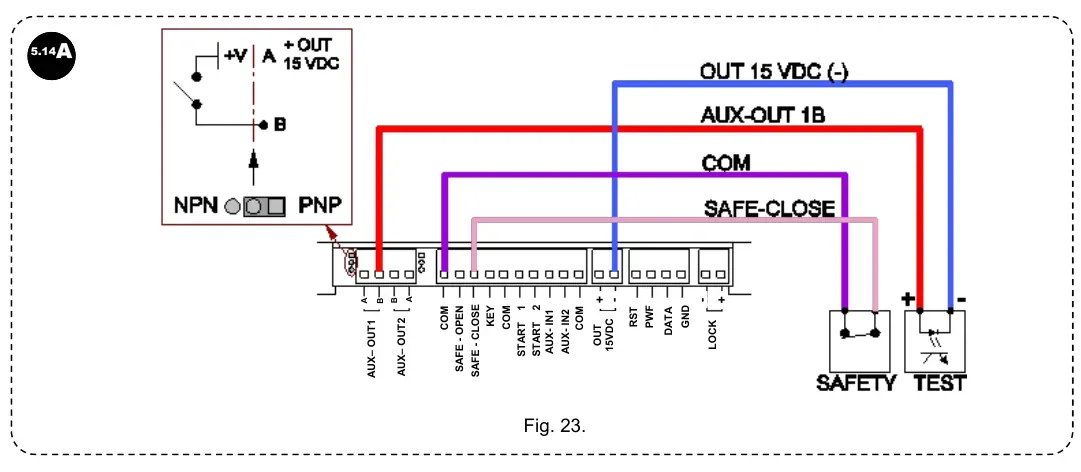
Рис. 23 — Електричні з’єднання допоміжних виходів
- AUX OUT 1/2: 0 — Контроль сенсорів; 1 — Блокування; 2 — Стан відкритих дверей; 3 — Стан закритих дверей; 4 — Несправність; 5 — Повторення сигналу керування замком
УВАГА: Максимальне навантаження контакту: 24 В — 100 мА. Перевантаження може пошкодити плату!
5.15 Встановлення та навчання сенсорів
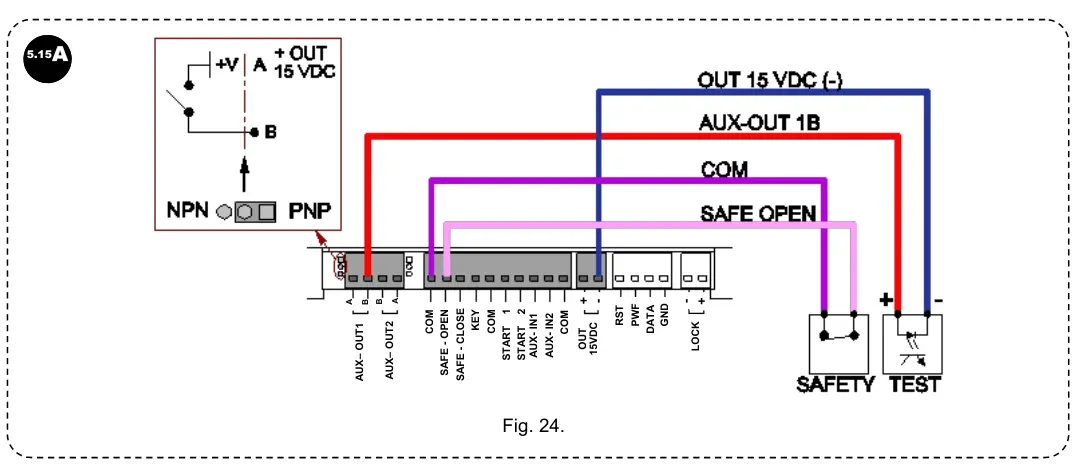
Рис. 24 — Схема підключення сенсорів безпеки (SAFE OPEN / SAFE CLOSE)
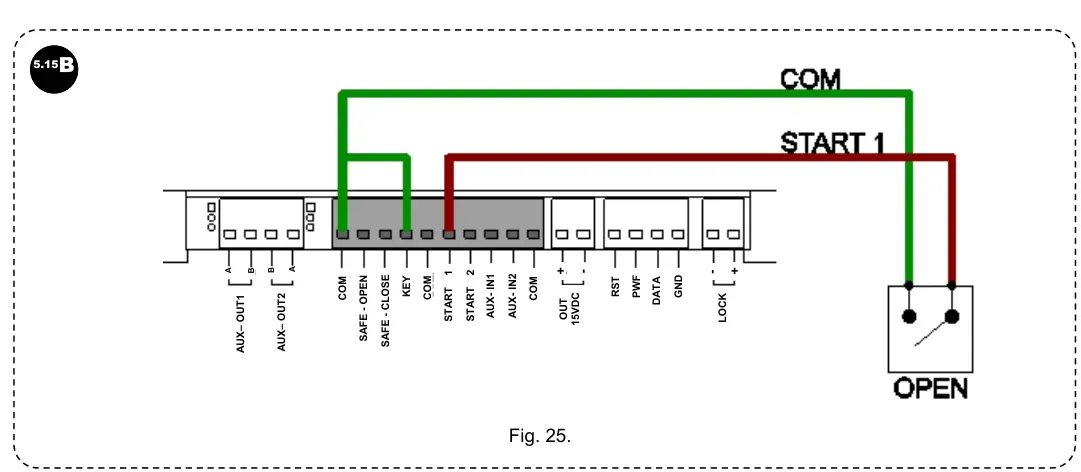
Рис. 25 — Схема підключення сенсорів детекції (радар вхідний)
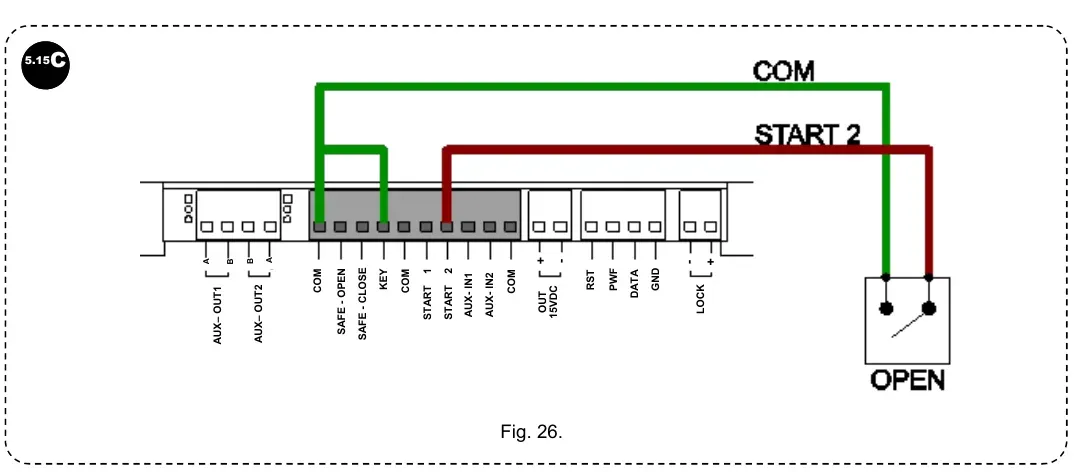
Рис. 26 — Схема підключення сенсорів детекції (радар вихідний)
Оператор підготовлений для управління:
- Сенсори безпеки (Рис. 21 A та B): монтуються на стулці для контролю зони поблизу та виявлення перешкод
- Сенсори детекції (Рис. 21 C та D): зазвичай монтуються на стіні для виявлення наближення людей
Процедура автоматичного навчання сенсорів: Якщо при введенні в експлуатацію конфігурація контрольованих сенсорів ще не збережена в пам’яті, дисплей покаже помилку E6. Вийдіть з цього стану, активувавши процедуру автоматичного навчання (параметр LS).
Результати навчання:
- S0 — Контрольованих сенсорів не виявлено: Сенсори не виявлені або керуються як звичайні
- S1 — Контрольований сенсор тільки при відкриванні: Контрольований сенсор тільки під час фази відкривання
- S2 — Контрольований сенсор тільки при закриванні: Контрольований сенсор тільки під час фази закривання
- S3 — Контрольований сенсор і при відкриванні, і при закриванні: Контрольований сенсор під час обох фаз
УВАГА: Ніколи не приймайте виявлену конфігурацію, якщо вона не відповідає фактичній конфігурації підключених сенсорів. Це може призвести до надзвичайно небезпечних ситуацій або несправності оператора.
УВАГА: У випадку подвійного VECTOR (2 стулки) процедура автоматичного навчання сенсорів повинна бути виконана на ОБОХ електронних платах (MASTER та SLAVE).
5.16 Управління DIP-перемикачами
На електронній платі є DIP-перемикач з 8 позиціями. Налаштування зчитуються та запам’ятовуються після скидання:
- 1 — Тип важеля: OFF=Шарнірний, ON=Жорсткий (за замовч. OFF)
- 2 — Режим Low Energy: OFF=Нормальний, ON=Low Energy (за замовч. OFF)
- 3 — Режим Push&Go: OFF=Деактивовано, ON=Активовано при пар. 14=0 (за замовч. OFF)
- 4 — Режим KEY входу: OFF=Бістабільний, ON=Моностабільний (за замовч. OFF)
- 5 — Тип приводу: OFF=Деактивовано, ON=Активовано (за замовч. ON)
- 6 — Повернення закриття в неручному режимі: OFF=Моторизоване, ON=Пружиною (за замовч. OFF)
- 7 — Дія після зіткнення при закриванні пружиною: OFF=Без повторного відкриття, ON=Повторне моторизоване відкриття (за замовч. OFF)
- 8 — Не використовується
5.17 Управління дисплеєм
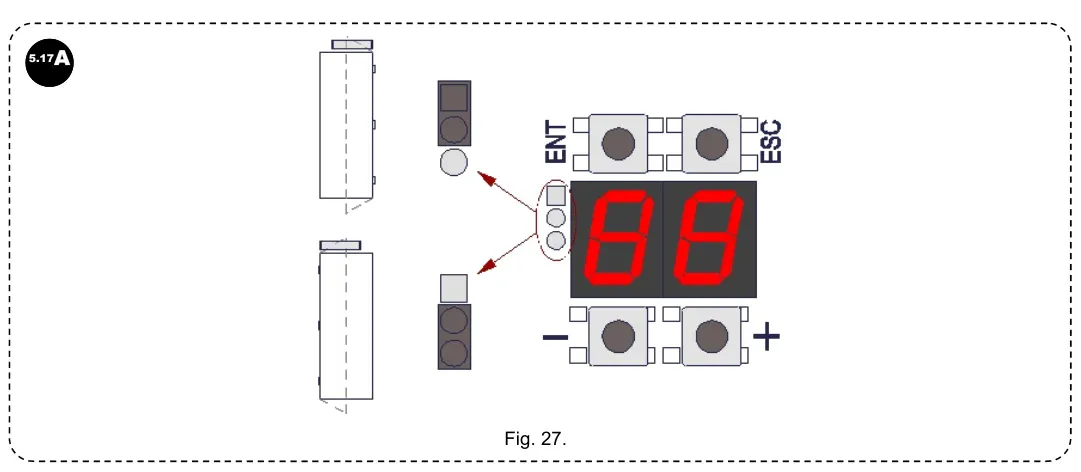
Рис. 27 — Дисплей з кнопками керування та джампер для коректного перегляду
Два семисегментні дисплеї з 4 кнопками контролюють основні параметри та розширені опції:
Порядок програмування:
- Виберіть параметр кнопками [+] та [−]; дисплей показує назву параметра
- Натисніть [ENT] для входу в режим перегляду/редагування
- Дисплей блимає поточним значенням. Змінюйте кнопками [+] та [−]
- Натисніть [ENT] для збереження або [ESC] для скасування
- Таймаут: якщо жодна кнопка не натиснута протягом 10 секунд — вихід з режиму програмування
- Для підтвердження операційних команд натисніть та утримуйте [ENT] протягом 5 секунд
Основні параметри дисплея
- 01 (Швидкість відкривання): 20°/с ÷ 70°/с (крок 5°/с) — 60
- 02 (Швидкість закривання): 20°/с ÷ 40°/с (крок 5°/с) — 20
- 03 (Час нормальної зупинки): 0 ÷ 60 с; 62=2хв; 63=3хв; 64=4хв — 0
- 04 (Час зупинки для інвалідів / Low Energy): 5 ÷ 60 с — 5
- 05 (Швидкість повернення пружиною): 1 ÷ 9 (1=мін, 9=макс) — 5
- 06 (Захист від защемлення): 1 ÷ 9 (1=найчутливіший, 9=найменш) — 5
- 07 (Прискорення): 5 ÷ 30 — 30
- 08 (Кут наближення): 10 ÷ 40 — 20
- 09 (Напруга керування електронним замком): 0=12В, 1=24В — 0
- 10 (Тип електронного замка): 0-6 (див. розділ 6.2.2) — 0
- 11 (Тривалість імпульсу замка): 0 ÷ 9 — 2
- 12 (Зусилля закриття замка): 0 (мін) ÷ 9 (макс) — 5
- 13 (Режим: одиночний/подвійний): 0=одиночний, 1=Master, 2=Slave — 0
- 14 (Активація замка за логічними налаштуваннями): 0=деактивовано, 1=1 радар, 2=2 радари, 3=1 та 2 — 3
- 15 (Конфігурація AUX-IN 1): 0-12 (див. таблицю) — 0
- 16 (Конфігурація AUX-IN 2): 0-12 (див. таблицю) — 1
- 17 (Конфігурація AUX-OUT 1): 0-5 — 0
- 18 (Конфігурація AUX-OUT 2): 0-5 — 1
- 19 (Адреса MultiMaster): 0=не керується, 1-15=унікальна адреса — 0
- 20 (Виключення безпеки відкриття): 0 ÷ 40% повного ходу — 0
- 21 (Затримка відкривання (подвійний)): 0 ÷ 100 (одиниць по 100 мс) — 0
- 22 (Затримка закривання (подвійний)): 0 ÷ 100 (одиниць по 100 мс) — 0
- 23-29 (Полярність входів): 0=НВ, 1=НЗ — різне
- 30-31 (Полярність виходів): 0=НВ, 1=НЗ — 0
- 32 (Рівень зусилля при процедурі LP): 5 ÷ 60 — 5
- 33 (Відсоток зменшення кута відкриття): 0 ÷ 50% — 0
- 34 (Монтаж стулки): 0=на перемичці, 1=на стулці (реверс) — 0
- 35 (Швидкість відкриття для інвалідів): 0=Low Energy, 1=як параметри 1 та 2 — 0
- 37 (Конфігурація входу START 2): 0-2 — 0
Операційні команди
- ST: Зупинка руху
- LS: Навчання сенсорів — процедура автоматичного розпізнавання контрольованих сенсорів
- Sd: Скидання до заводських налаштувань та скидання точок
- Lp: Навчання параметрів стулки (self-learning)
УВАГА: Під час фази модифікації параметрів всі рухи двигуна будуть заблоковані.
6. Введення в експлуатацію
6.1 Запуск
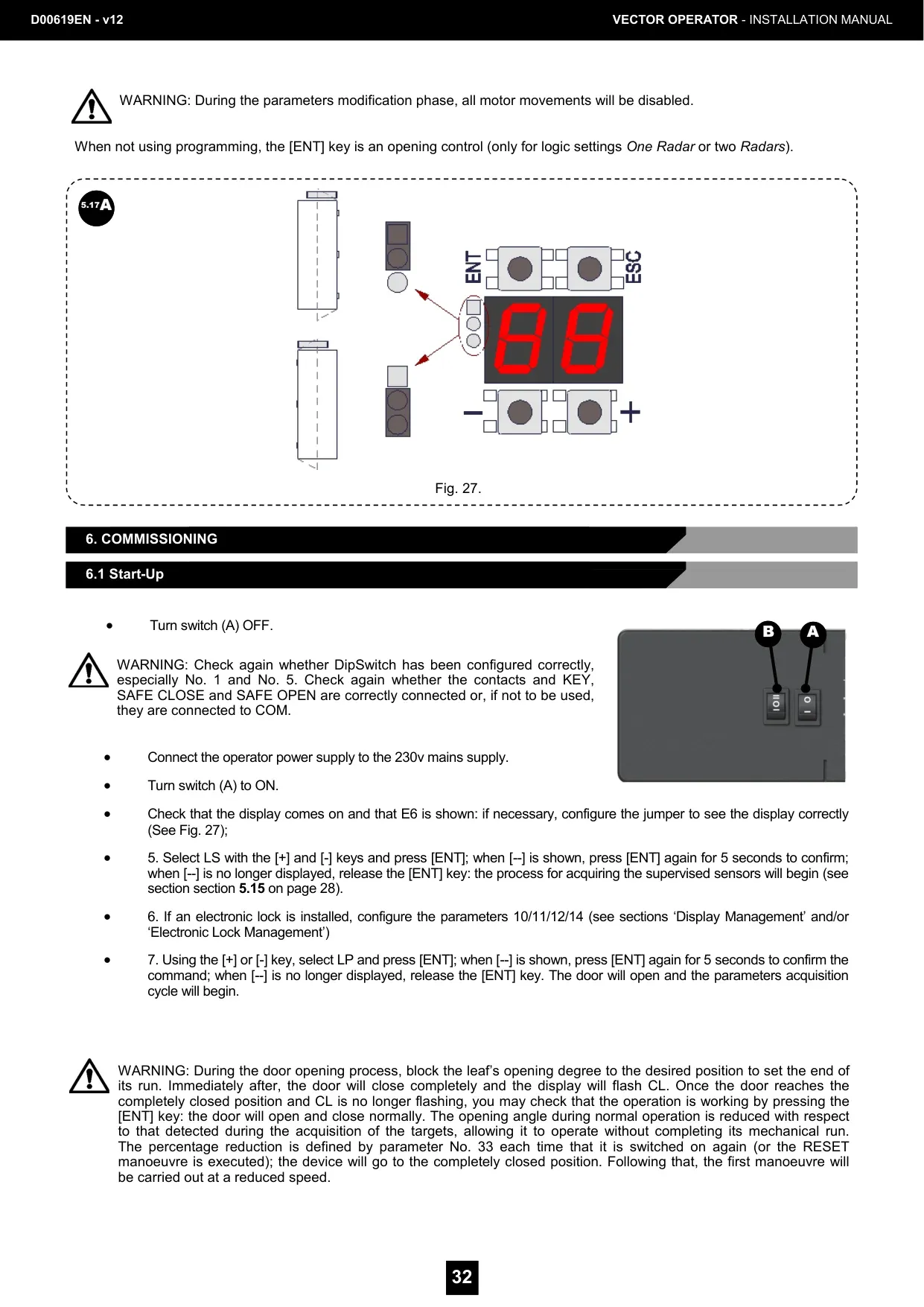
Рис. 27 — Процедура введення в експлуатацію
- Переведіть перемикач (A) у положення OFF
- Підключіть живлення оператора до мережі 230В
- Переведіть перемикач (A) у положення ON
- Перевірте, що дисплей увімкнувся та показує E6; за необхідності налаштуйте джампер для коректного перегляду (Рис. 27)
- Виберіть LS кнопками [+] та [−], натисніть [ENT]; коли відображається [—], натисніть [ENT] знову на 5 секунд; розпочнеться процедура навчання сенсорів
- Якщо встановлений електронний замок — налаштуйте параметри 10/11/12/14
- Виберіть LP кнопками [+] або [−], натисніть [ENT]; коли відображається [—], натисніть [ENT] на 5 секунд для підтвердження. Двері відкриються і почнеться цикл навчання параметрів
УВАГА: Перевірте знову, чи правильно налаштований DIP-перемикач, особливо №1 та №5. Перевірте, чи правильно підключені контакти KEY, SAFE CLOSE та SAFE OPEN, або, якщо вони не використовуються, чи з’єднані вони з COM.
Важливо: Під час процесу відкриття дверей заблокуйте стулку у бажаному положенні максимального відкриття. Після цього двері повністю закриються, а дисплей блимає CL. Коли двері досягнуть повністю закритого положення, ви можете перевірити роботу натисканням кнопки [ENT].
6.2 Управління та використання
6.2.1 Налаштування логіки роботи оператора
- LOW-ENERGY: У всіх режимах роботи (крім «Зупинка закрито») доступне моторизоване відкриття зі зниженою швидкістю (швидкість Low Energy) та збільшеним часом зупинки (час зупинки для осіб з інвалідністю). Може бути активоване за допомогою входу конфігурації AUX IN 1 із налаштуванням параметра 15=0 (див. розділ «Управління дисплеєм»). Закриття здійснюється пружиною з контролем перешкод.
- PUSH & GO: Ручне переміщення нерухомої стулки із закритого положення автоматично створює цикл відкриття та закриття. Для конфігурації цього логічного налаштування необхідно встановити DIP 3 = ON.
- SAFE CLOSE: Якщо сенсор безпеки, встановлений на стулці та підключений до електронної плати (у режимі Safe Close), виявляє перешкоду під час фази закриття — він негайно перериває та швидко змінює напрямок руху стулки, повністю відкриваючи її на стандартній швидкості, а потім знову закриваючи в нормальному режимі. Якщо виявлення відбувається під час фази відкриття — система не реагує і двері продовжують рух за своїм курсом.
- SAFE OPEN: Якщо сенсор безпеки, встановлений на стулці та підключений до електронної плати (у режимі Safe Open), виявляє перешкоду під час фази відкриття — він перериває рух стулки; якщо через деякий час нічого не відбувається, стулка повертається до руху відкриття та закривається на нормальній швидкості. Якщо виявлення відбувається під час фази закриття — система не реагує і двері продовжують рух за своїм курсом. Якщо стулка встановлена близько до стіни (наприклад, у коридорі), слід задати значення (% від повного ходу), щоб сенсор не сприймав стіну як перешкоду. Це значення можна змінити за допомогою параметра 20 (див. розділ «Управління дисплеєм»).
Операційні логічні налаштування
- Ручний (Manual): При цьому логічному налаштуванні входи керування, підключені до START1 та START2, відключені — дозволяється ручне відкриття та закриття. Сенсори безпеки відкриття та закриття активні тільки у випадку, коли потрібне моторизоване відкриття для осіб з інвалідністю.
- 1 радар: ТІЛЬКИ ВИХІДНИЙ РАДАР — контролюється тільки вхід START2 на електронній платі. Сигнал від сенсора, підключеного до цього входу, спричиняє відкриття та наступне закриття стулки. Блокування дверей замком або мотором (у випадках, коли замок не обрано) у закритому положенні залежить від типу замка та конфігурації параметра 14.
- 2 радари: ВХІДНИЙ ТА ВИХІДНИЙ РАДАР — обидва входи START1 та START2 на електронній платі активні. Сигнал від сенсора, підключеного до одного з входів, спричиняє відкриття та наступне закриття стулки. Блокування дверей замком або мотором (у випадках, коли замок не обрано) у закритому положенні залежить від типу замка та конфігурації параметра 14.
- Зупинка закрито (Stop closed): Двері заблоковані у закритому положенні. Пристрій контролює повне закриття стулки. При цьому логічному налаштуванні входи START1 та START2 на електронній платі не контролюються, а електронний замок (за наявності) блокує стулку. Якщо електронний замок не встановлено — стулка блокується мотором.
- Зупинка відкрито (Stop open): Двері заблоковані у відкритому положенні. Пристрій контролює повне відкриття стулки. При цьому логічному налаштуванні входи START1 та START2 на електронній платі не контролюються.
- Антизащемлення при відкриванні: Під час фази відкриття стулка зустрічає перешкоду, що заважає руху. Оператор перериває рух стулки на кілька секунд, а потім повільно повністю закриває її. Значення чутливості може бути відрегульоване за допомогою параметра 06 (див. розділ «Управління дисплеєм»).
- Антизащемлення при закриванні: Під час фази закриття стулка зустрічає перешкоду, що заважає руху. Оператор негайно інвертує рух стулки та повністю відкриває її. Наступне закриття виконується повільно. Значення чутливості може бути відрегульоване за допомогою параметра 06 (див. розділ «Управління дисплеєм»).
6.2.2 Управління електронними замками
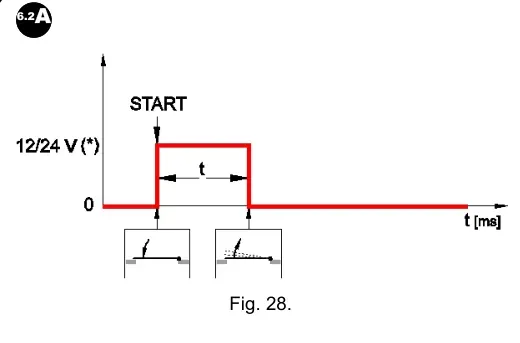
Рис. 28 — Електронний замок з механічним скиданням
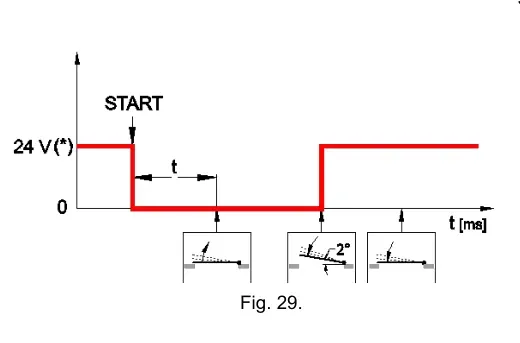
Рис. 29 — Електромагніт (maglock) — часова діаграма
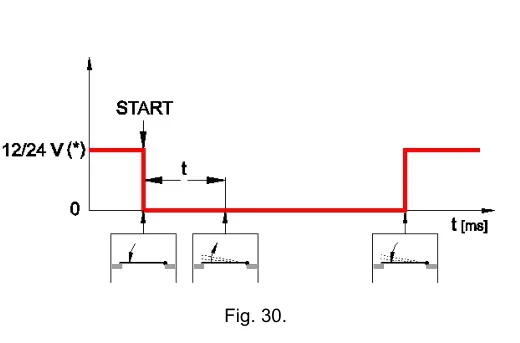
Рис. 30 — Електронний замок з засувкою — часова діаграма
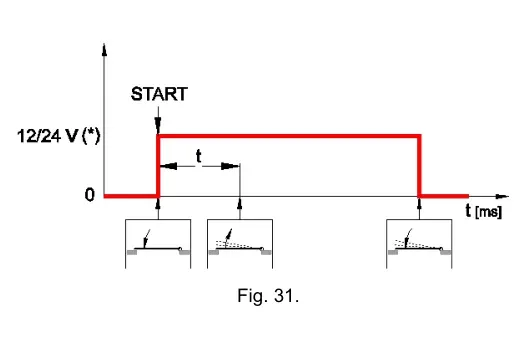
Рис. 31 — Моторизований замок — часова діаграма
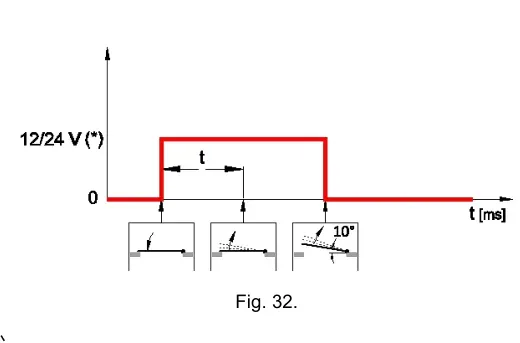
Рис. 32 — Електронний замок з автоматичним скиданням — часова діаграма
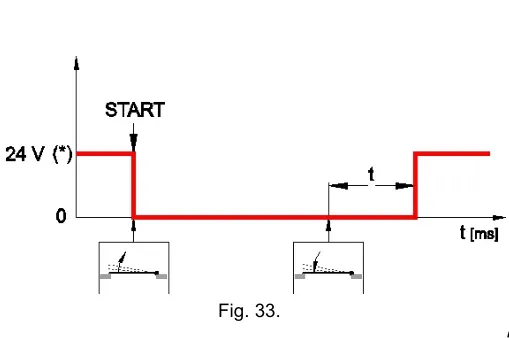
Рис. 33 — Електромагніт із затримкою — часова діаграма
- 1 — Електронний замок з механічним скиданням — 1: При подачі імпульсу стулка розблокується, замок автоматично скидається при закриванні
- 2 — Електромагніт (maglock) — 2: При подачі живлення утримує двері закритими; при відключенні — двері вільні (тільки 24В)
- 3 — Електронний замок з засувкою — 3: При живленні засувка утримує двері; при відключенні — засувка піднімається
- 4 — Моторизований замок — 4: Електронний замок з електростартером; при живленні втягує фіксуючий важіль
- 5 — Електронний замок з автоматичним скиданням — 5: При живленні звільняє стулку; скидається при відключенні коли стулка відкрита >10°
- 6 — Електромагніт із затримкою — 6: При живленні утримує двері; при відключенні звільняє. Вмикається знову після повного закриття (тільки 24В)
6.2.3 Роз’єм перемикача програм
Для підключення перемикача програм (Рис. 21, F) використовуйте екранований кабель з 4 дротами 0,22 мм, екран не підключайте.
6.2.4 Роз’єм зовнішніх периферійних пристроїв (15 В постійного струму)
Реальне значення напруги живлення може відхилятися від 15 В ±5% залежно від резистивного навантаження.
OUT = ПОЗИТИВНИЙ (+) / COM = НЕГАТИВНИЙ (−)
УВАГА: Не інвертуйте полярність живлення! Світлодіод горить — нормальне живлення 15 В. Якщо вимкнений — перевірте наявність мережевого живлення.
6.2.5 Підключення та використання подвійного VECTOR
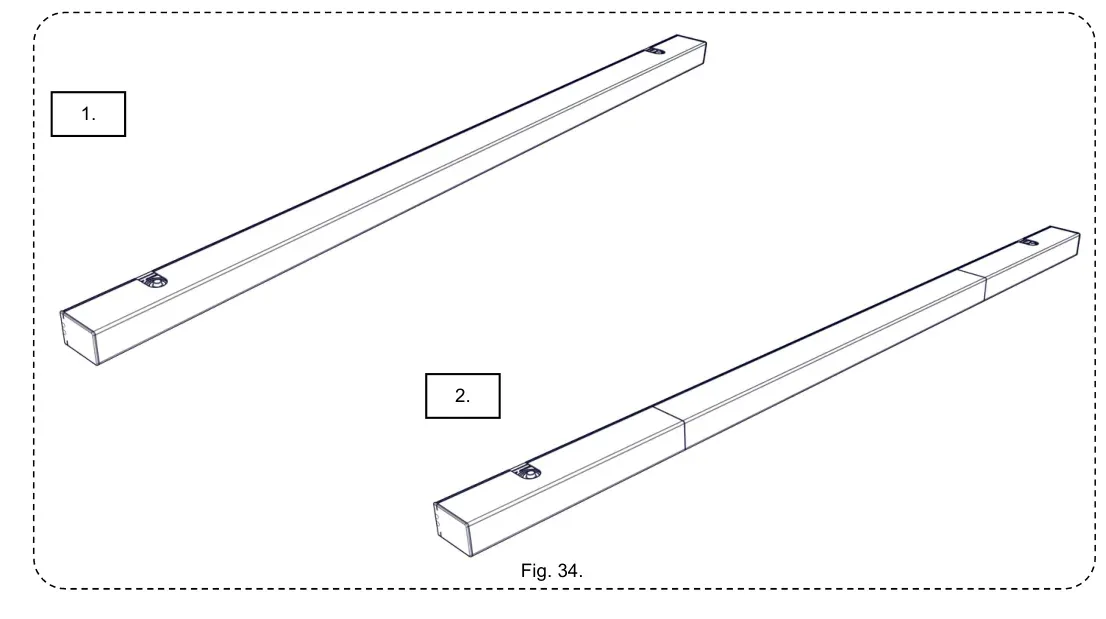
Рис. 34 — Два варіанти підключення подвійного VECTOR
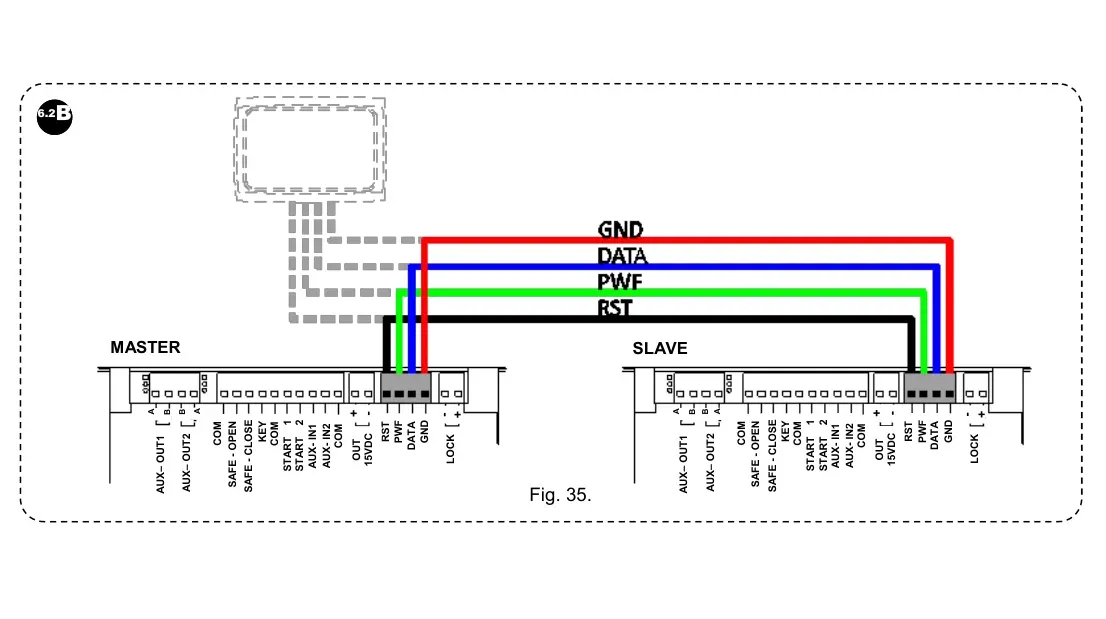
Рис. 35 — Схема підключення Master/Slave
Подвійний VECTOR — це з’єднання двох операторів для двостулкових розпашних дверей. Може бути підключений двома способами:
- Два окремі VECTOR, кожен встановлений на своїй стулці, з’єднані між собою
- Два VECTOR, з’єднані разом комплектом подовження (опціонально)
За конвенцією: MASTER стулка: першою відкривається, останньою закривається (при затримці) SLAVE стулка: останньою відкривається, першою закривається (при затримці)
Налаштування:
- На MASTER платі: параметр 13 = 1
- На SLAVE платі: параметр 13 = 2
УВАГА: Обидва оператори повинні бути підключені до однієї лінії живлення, і між ними не повинно бути перемикачів або запобіжників. Периферійні пристрої (KEY, START 1, START 2) підключаються тільки до MASTER. Сенсори безпеки (SAFE OPEN та SAFE CLOSE) підключаються та контролюються окремо обома платами.
6.2.6 Блокування (Interlocking) — підключення та використання
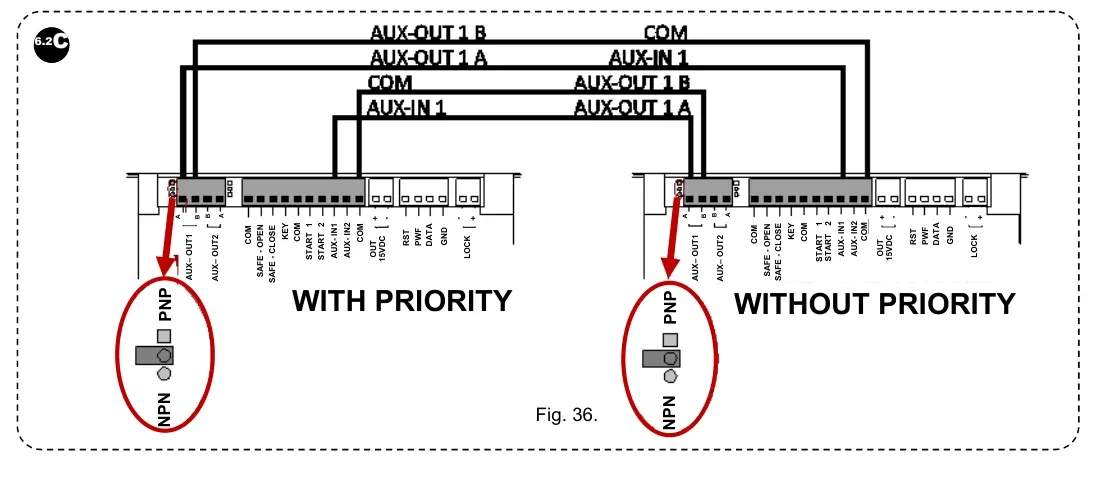
Рис. 36 — Схема підключення блокування між двома операторами
Центральний блок керування VECTOR може працювати в режимі блокування через з’єднання з електронним центральним блоком того ж класу. Відкриття одних дверей можливе незалежно, якщо інші не рухаються.
Налаштування:
- На платі З ПРІОРИТЕТОМ: параметр 15=2, параметр 17=1
- На платі БЕЗ ПРІОРИТЕТУ: параметр 15=3, параметр 17=1
6.2.7 Нормальна зупинка та аварійна зупинка
Нормальна зупинка автоматичних дверей manusa та процес запуску виконуються автоматично. Проте може бути встановлена опціональна аварійна зупинка.
7. Безпека
7.1 Загальні інструкції з безпеки
Перед виконанням будь-яких робіт:
- Підтримуйте робочу зону чистою та впорядкованою
- Забезпечте достатнє освітлення
- Переконайтеся у відсутності легкозаймистих рідин та газів в робочій зоні
- Чітко позначте робочу зону для сторонніх осіб
Одяг та ЗІЗ:
- Не носіть вільний одяг, прикраси, краватки, що можуть потрапити у рухомі частини
- Довге волосся має бути зібране
- Використовуйте захисні рукавиці та захисне взуття
7.2 Необхідні засоби індивідуального захисту
- Захисні рукавиці
- Захисне взуття від механічних пошкоджень
7.3 Ідентифікація небезпечних зон
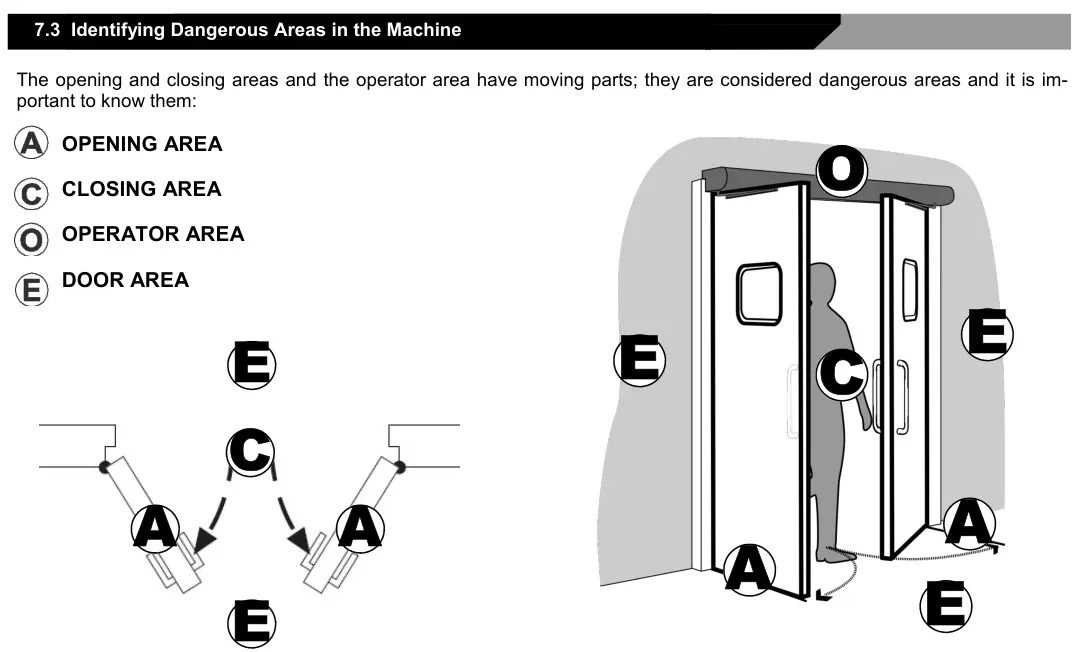
Рис. — Ідентифікація небезпечних зон машини
Зони відкриття, закриття та зона оператора мають рухомі частини — вони вважаються небезпечними зонами.
7.4 Оцінка ризиків
Оцінка ризиків — це систематичний процес ідентифікації, аналізу та оцінювання потенційних небезпек, пов’язаних з експлуатацією автоматичних дверей. Її мета — визначити всі можливі загрози для здоров’я та безпеки людей, що можуть виникнути під час нормальної роботи, технічного обслуговування або аварійних ситуацій, а також встановити відповідні заходи для зниження цих ризиків до прийнятного рівня.
Оцінка ризиків виконується відповідно до стандартів EN 16005 та EN 12453 і включає наступні етапи:
- Ідентифікація небезпек — визначення всіх потенційних джерел небезпеки (механічні, електричні, термічні тощо) у кожній зоні роботи дверей
- Аналіз ризиків — оцінка ймовірності виникнення кожної небезпеки та тяжкості можливих наслідків
- Оцінювання ризиків — порівняння виявлених ризиків з допустимими рівнями та визначення пріоритетів
- Заходи зниження ризиків — впровадження конструктивних рішень, захисних пристроїв (сенсори безпеки, фотоелементи, обмежувачі зусилля) та організаційних заходів (маркування, інструкції, навчання)
Правильно проведена оцінка ризиків є обов’язковою умовою для введення автоматичних дверей в експлуатацію та для отримання відповідності стандартам CE. Монтажник несе відповідальність за проведення оцінки ризиків для кожного конкретного об’єкта з урахуванням місцевих умов: інтенсивності руху, типу користувачів (діти, люди з обмеженими можливостями), кліматичних факторів та особливостей приміщення.
Механічні ризики
- Структурний — Зона пристрою: Оцінити придатність конструкції: рівна підлога, достатня несуча здатність, без перешкод
- Стабільність — Зона пристрою: Надійно кріпити всі частини відповідними матеріалами
- Зрізання, порізи — Зона закриття: Не використовувати звичайне скло; перевірити відсутність гострих країв
- Затягування — Всередині оператора: Не маніпулювати внутрішніми частинами під час роботи
- Удар, защемлення — Зона закриття: Відрегулювати зусилля закриття; перевірити роботу фотоелементів безпеки
Електричні ризики
- Прямий/непрямий контакт — Всередині оператора: Використовувати компоненти з маркуванням CE; перевіряти всі з’єднання
- Розсіювання електроенергії — Оператор: Дотримуватися правил електротехніки низької напруги
7.5 Правила безпеки
Заходи безпеки, впроваджені під час проектування:
- Просте управління
- Мінімальна кількість інструментів
- Легкий моніторинг
- Доступність до внутрішніх частин
- Оператори захищені металевим шасі від несанкціонованого маніпулювання
- Немає незакріплених деталей при відкриванні шасі
8. Технічне обслуговування та інспекція
8.1 Загальне обслуговування (для користувача)
Обов’язки користувача з обслуговування обмежуються виключно підтримкою чистоти та порядку в зоні дверей.
ВАЖЛИВО: Усі операції з обслуговування, окрім функціональних тестів, повинні виконуватися після відключення живлення від мережі.
ВАЖЛИВО: Якщо мережевий кабель пошкоджений, він повинен бути замінений спеціальним комплектом, наданим виробником або авторизованою сервісною службою.
Монтаж, обслуговування, регулювання та ремонт повинні виконуватися виключно технічним персоналом, авторизованим manusa.
8.2 Завдання обслуговування, зарезервовані для виробника
Використовуйте тільки оригінальні запасні частини.
Періодичність обслуговування для розпашних дверей: кожні 12 місяців
Без електроживлення:
- Очистити та змастити обертові деталі, петлі тощо
- Перевірити міцність точок кріплення
- Затягнути гвинти
З електроживленням:
- Перевірити правильну роботу елементів безпеки
9. Пошук та усунення несправностей
- OP горить: Двері відкриті
- OP блимає: Двері відкриваються
- CL горить: Двері закриті
- CL блимає: Двері закриваються
- E1: Помилка: параметри системи не ініціалізовані (не виконано самонавчання)
- E2: Помилка вибору типу пристрою (DIP 5) або типу важеля (DIP 1)
- E3/E4: Помилка перевищення максимального порогу струму (OVER CURRENT)
- E6: Помилка контрольованих сенсорів
- E8: Помилка підключення кодера
Порада: У більшості випадків для відновлення роботи дверей достатньо вибрати режим відкриття дверей, а потім автоматичний режим. Якщо після цього аномалія зберігається — зверніться до авторизованого сервісного техніка manusa.
10. Додатки
10.1 Декларація відповідності CE
Декларація відповідності CE
10.2 Контрольний список монтажу (Checklist)
Механічні / електричні елементи:
-
Кріплення оператора на місці
-
Положення тягового / штовхаючого оператора
-
Кришка та зовнішні заглушки
-
Кріплення та підвіска стулок
-
Рівень навантаження пружини (EN4 / EN5 / EN6) це я дописав
-
Проводка
-
Параметр Push & Go
-
Параметр тягового / штовхаючого режиму
-
Параметр приводу: S (пружина) / M (мотор)
-
Параметр прискорення
-
Стан стулок
-
Параметр Low Energy
-
Параметр часу очікування
-
Вісь та важіль
-
Параметр замка
-
Конфігурація допоміжних I/O
-
Периферійні пристрої керування (перемикач / зовнішній ключ…) Елементи безпеки та контролю:
-
Системи виявлення (радар…)
-
Сенсори безпеки Документація:
-
Інструкція з монтажу надана
-
Акт здачі робіт наданий
-
Контракт на обслуговування наданий
10.3 Журнал технічного обслуговування
Періодичність для розпашних дверей: кожні 12 місяців (згідно UNE 85121EX)